838:
910:
826:
783:
132:
20:
357:
120:
811:
The utilization of the 1:1 gear train is used because of the behavior of parallelogram linkages. Opposite 'sides' of the parallelogram linkages share the same rotational motion function. Because both parallelograms were constructed off of the center coupler link, the new links connected to the ground
877:
One characteristic with cognate linkages is that they often share at least two links in identical configuration. These links are usually oriented 180 degrees of each other, so when pairing, these links can be fused. This creates a 4-bar linkage with two additional links, both of which are defined by
900:
Rather than overlapping the paired links, they can be attached in a fashion which forms a parallelogram, resulting in eight-bar cognate linkages. Triplet cognate linkage pairings and further extensions are also possible, allowing for the number of links of cognate linkages to increase theoretically
865:
The geared five-bar cognate linkage utilizes a 1:1 gear train to ensure two links have the same rotational motion function. However, an alternative to using a gear train to achieve 1:1 rotation is to connect them together using a parallelogram linkage, adding one additional link.
1237:
Similar quadrilaterals will have links which share the same motion function. Because one link is shared between the two quadrilaterals, then as long as the new quadrilaterals are similar to the original, both will still share a link with the same motion function.
100:
For a coupler curve produced by a four-bar linkage with four revolute joints and a prismatic (slider) joint, there exist only two four-bar linkages, as the third would be composed of two sliders, making it a four-bar linkage with two degrees of freedom.
503:
96:
The theorem states, for a given coupler curve produced by a four-bar linkage with four revolute (hinge) joints, there exist three four-bar linkages, three geared five-bar linkages, and more six-bar linkages which will generate the same path.
78:, states that each coupler curve can be generated by three different four-bar linkages. These four-bar linkages can be constructed using similar triangles and parallelograms, and the Cayley diagram (named after
881:
Each of these paired six-bar cognate linkages can also be converted into another cognate linkage by flipping the linkage over, and switching the roles of the rectilinear link and the ground link.
1184:
1130:
1241:
If the new quadrilaterals do not share the same ground joint (as shown with joint C'), they can still be connected together using a parallelogram linkage, forming an 8-bar function cognate.
794:
has two degrees of freedom, and thus there does not exist a five-bar linkage which is capable of acting as a cognate. However, it is possible to generate a 5-bar cognate using gears.
1228:
388:
754:
1000:
961:
1076:
1048:
1023:
920:
linkages are linkages which share the same motion functions for their input and output links. This is performed using a six-bar Watt II linkage arrangement.
874:
An important behavior with four-bar linkages is that once the positions of two links is defined, the other two links in the four-bar linkage can be defined.
878:
the original four-bar linkage. The former ground link of the fusing 4-bar linkage becomes a rectilinear link that travels follows the same coupler curve.
889:
Appending onto the method of the six-bar pairings, the links do not necessarily have to overlap, but rather just need to meet the criterion such that:
1342:
909:
837:
1461:
1277:
71:
1298:
85:
812:
share identical rotational motion functions, allowing for a 1:1 gear train to be used to connect them together.
848:
825:
782:
498:{\displaystyle K_{L}={\frac {\sin(\alpha )}{\sin(\beta )}}\qquad K_{R}={\frac {\sin(\gamma )}{\sin(\beta )}}}
896:
The former ground link of one of the linkages is directly attached to the point producing the coupler curve.
804:
On each parallelogram, find the sides opposite of the connecting link. Apply a 1:1 gear train between them.
786:
Animation showing the construction of a geared five-bar cognate linkages from an initial four-bar cognate.
1301:
configurations that have a DOF of 0, however they are not useful in the construction of cognate linkages.
1135:
1081:
709:
966:
927:
1403:
1378:
1266:
137:
Animation showing the construction of two four-bar cognate linkages from an initial four-bar cognate.
55:
131:
831:
Animation showing the construction of a six-bar cognate linkages from an initial four-bar cognate.
801:
Construct two parallelograms off of the center coupler link and the links connected to the ground.
1363:
1321:
843:
Animation showing the construction of
Chebyshev's table linkage using the two cognate linkages
1338:
1271:
844:
75:
19:
1440:
1415:
1390:
1256:
1192:
791:
230:
63:
59:
62:
geometry or input-output relationship, while being dimensionally dissimilar. In case of
1429:"Coupler cognate mechanisms of certain parallelogram forms of watt's six-link mechanism"
1056:
1028:
1261:
1008:
1428:
1419:
1394:
1455:
1444:
1250:
79:
365:
853:
The pink link indicates the former ground link that has become a rectilinear link.
1359:
356:
47:
770:, one cognate will be a crank-rocker, and the second will be a double-rocker.
119:
773:
If the original is a double-rocker, the cognates will be crank-rockers.
88:
can be obtained by connecting two or more cognate linkages together.
1379:"Four- and six-bar function cognates and overconstrained mechanisms"
355:
1333:
Uicker, John J.; Pennock, Gordon R.; Shigley, Joseph E. (2003).
33:
1351:
Samuel
Roberts (1875) "On Three-bar Motion in Plane Space",
924:
Split the six bar linkage into two quadrilaterals (shown as
39:
16:
Linkages of different dimensions with the same output motion
364:
The lengths of the four members can be found by using the
23:
Showcase of nine different coupler-curve cognate linkages.
913:
Animation showing the construction of a function cognate.
893:
There is a pair of two links in identical configuration.
27:
1404:"Applications of Watt II function generator cognates"
1195:
1138:
1084:
1059:
1031:
1011:
969:
930:
712:
391:
125:
Cayley diagram for generating 4-bar coupler cognates.
1222:
1178:
1124:
1070:
1042:
1017:
994:
955:
748:
497:
885:Construction of coupler cognates with more links
1353:Proceedings of the London Mathematical Society
67:
1362:, p 169, New York: McGraw-Hill, weblink from
8:
1078:, form two similar quadrilaterals (shown as
870:Pairing previously derived cognates together
756:Both 4-bar cognates will be class I chains.
1358:Hartenberg, R.S. & J. Denavit (1964)
1194:
1146:
1137:
1092:
1083:
1058:
1030:
1010:
977:
968:
938:
929:
711:
457:
448:
405:
396:
390:
105:Construction of four-bar coupler cognates
908:
816:Construction of six-bar coupler cognates
781:
778:Construction of geared five-bar cognates
507:
18:
1314:
1290:
861:Alternative to geared five-bar cognates
1402:Simionescu, P.A.; Smith, M.R. (2000).
1377:Simionescu, P.A.; Smith, M.R. (2001).
7:
763:), both cognates will be drag links.
1179:{\displaystyle \square X_{2}C'D'E'}
1125:{\displaystyle \square X_{1}A'B'C'}
798:Select four-bar linkage of choice.
749:{\displaystyle (\ell +s)<(p+q)}
14:
1335:Theory of Machines and Mechanisms
702:If and only if the original is a
347:Put dimensions on Cayley diagram.
344:Separate left and right cognate.
1322:Roberts and Chebyshev (Springer)
995:{\displaystyle \square X_{2}CDE}
956:{\displaystyle \square X_{1}ABC}
836:
824:
759:If the original is a drag-link (
130:
118:
34:Geared five-bar cognate linkages
1360:Kinematic synthesis of linkages
443:
743:
731:
725:
713:
489:
483:
472:
466:
437:
431:
420:
414:
1:
1420:10.1016/S0094-114X(00)00011-2
1395:10.1016/S0094-114X(01)00031-3
1445:10.1016/0022-2569(70)90023-6
1408:Mechanism and Machine Theory
1383:Mechanism and Machine Theory
288:Using a parallelogram, find
38:Bottom row: Closely related
1337:. Oxford University Press.
1280:- Roberts–Chebyshev Theorem
1274:- Roberts–Chebyshev Theorem
1005:Translate the ground joint
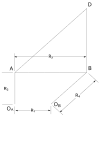
167:Using parallelograms, find
1478:
1053:With the new ground joint
86:Overconstrained mechanisms
42:, derived from middle row.
352:Dimensional relationships
92:Roberts–Chebyshev theorem
68:Roberts–Chebyshev Theorem
28:Four-bar cognate linkages
1189:Reform the shared link
849:Chebyshev lambda linkage
320:Check similar triangles
144:From original triangle,
40:six-bar cognate linkages
36:, derived from top row.
1224:
1223:{\displaystyle C'B'D'}
1180:
1126:
1072:
1044:
1019:
996:
957:
914:
787:
750:
499:
382:are found as follows.
361:
164:Sketch Cayley diagram.
66:coupler cognates, the
43:
1462:Linkages (mechanical)
1433:Journal of Mechanisms
1225:
1181:
1127:
1073:
1045:
1020:
997:
958:
912:
785:
766:If the original is a
751:
500:
359:
58:that ensure the same
22:
1324:Retrieved 2012-10-12
1267:Linkage (mechanical)
1193:
1136:
1082:
1057:
1029:
1009:
967:
928:
710:
389:
1427:Soni, A.H. (1970).
1297:There are specific
1025:to a new location,
360:Linkage dimensions.
1364:Cornell University
1233:Separate Cognates.
1220:
1176:
1122:
1071:{\displaystyle C'}
1068:
1043:{\displaystyle C'}
1040:
1015:
992:
953:
915:
807:Separate cognates.
788:
746:
495:
362:
44:
1414:(11): 1535–1549.
1272:Pafnuty Chebyshev
1018:{\displaystyle C}
905:Function cognates
845:Chebyshev linkage
694:
693:
493:
441:
231:similar triangles
76:Pafnuty Chebyshev
1469:
1448:
1423:
1398:
1348:
1325:
1319:
1302:
1295:
1257:Four-bar linkage
1253:- Cayley Diagram
1229:
1227:
1226:
1221:
1219:
1211:
1203:
1185:
1183:
1182:
1177:
1175:
1167:
1159:
1151:
1150:
1131:
1129:
1128:
1123:
1121:
1113:
1105:
1097:
1096:
1077:
1075:
1074:
1069:
1067:
1049:
1047:
1046:
1041:
1039:
1024:
1022:
1021:
1016:
1001:
999:
998:
993:
982:
981:
962:
960:
959:
954:
943:
942:
918:Function cognate
840:
828:
792:five-bar linkage
755:
753:
752:
747:
690:
676:
662:
648:
629:
615:
601:
587:
568:
558:
548:
538:
508:
504:
502:
501:
496:
494:
492:
475:
458:
453:
452:
442:
440:
423:
406:
401:
400:
381:
374:
340:
316:
296:
284:
268:
250:
241:
225:
204:
184:
175:
159:
134:
122:
64:four-bar linkage
52:cognate linkages
1477:
1476:
1472:
1471:
1470:
1468:
1467:
1466:
1452:
1451:
1426:
1401:
1376:
1373:
1371:Further reading
1345:
1332:
1329:
1328:
1320:
1316:
1311:
1306:
1305:
1299:overconstrained
1296:
1292:
1287:
1247:
1212:
1204:
1196:
1191:
1190:
1168:
1160:
1152:
1142:
1134:
1133:
1114:
1106:
1098:
1088:
1080:
1079:
1060:
1055:
1054:
1032:
1027:
1026:
1007:
1006:
973:
965:
964:
934:
926:
925:
907:
887:
872:
863:
858:
857:
856:
855:
854:
852:
841:
833:
832:
829:
818:
780:
708:
707:
699:
689:
684:
679:
675:
670:
665:
661:
656:
651:
647:
642:
637:
628:
623:
618:
614:
609:
604:
600:
595:
590:
586:
581:
576:
567:
561:
557:
551:
547:
541:
537:
531:
476:
459:
444:
424:
407:
392:
387:
386:
380:
376:
373:
369:
354:
339:
333:
327:
321:
315:
309:
303:
297:
295:
289:
283:
277:
270:
264:
258:
251:
249:
243:
240:
234:
224:
218:
212:
206:
203:
197:
191:
185:
183:
177:
174:
168:
158:
152:
145:
142:
141:
140:
139:
138:
135:
127:
126:
123:
112:
107:
94:
37:
31:
25:
24:
17:
12:
11:
5:
1475:
1473:
1465:
1464:
1454:
1453:
1450:
1449:
1439:(2): 203–215.
1424:
1399:
1389:(8): 913–924.
1372:
1369:
1368:
1367:
1356:
1349:
1343:
1327:
1326:
1313:
1312:
1310:
1307:
1304:
1303:
1289:
1288:
1286:
1283:
1282:
1281:
1278:Samuel Roberts
1275:
1269:
1264:
1262:Kinematic pair
1259:
1254:
1246:
1243:
1235:
1234:
1231:
1218:
1215:
1210:
1207:
1202:
1199:
1187:
1174:
1171:
1166:
1163:
1158:
1155:
1149:
1145:
1141:
1120:
1117:
1112:
1109:
1104:
1101:
1095:
1091:
1087:
1066:
1063:
1051:
1038:
1035:
1014:
1003:
991:
988:
985:
980:
976:
972:
952:
949:
946:
941:
937:
933:
906:
903:
901:indefinitely.
898:
897:
894:
886:
883:
871:
868:
862:
859:
842:
835:
834:
830:
823:
822:
821:
820:
819:
817:
814:
809:
808:
805:
802:
799:
779:
776:
775:
774:
771:
764:
757:
745:
742:
739:
736:
733:
730:
727:
724:
721:
718:
715:
698:
695:
692:
691:
687:
682:
677:
673:
668:
663:
659:
654:
649:
645:
640:
635:
634:Right cognate
631:
630:
626:
621:
616:
612:
607:
602:
598:
593:
588:
584:
579:
574:
570:
569:
565:
559:
555:
549:
545:
539:
535:
529:
525:
524:
521:
518:
515:
512:
506:
505:
491:
488:
485:
482:
479:
474:
471:
468:
465:
462:
456:
451:
447:
439:
436:
433:
430:
427:
422:
419:
416:
413:
410:
404:
399:
395:
378:
371:
353:
350:
349:
348:
345:
342:
335:
329:
323:
318:
313:
307:
299:
291:
286:
281:
275:
262:
256:
247:
238:
227:
222:
216:
208:
201:
195:
187:
181:
172:
165:
156:
150:
136:
129:
128:
124:
117:
116:
115:
114:
113:
111:
110:Cayley diagram
108:
106:
103:
93:
90:
72:Samuel Roberts
15:
13:
10:
9:
6:
4:
3:
2:
1474:
1463:
1460:
1459:
1457:
1446:
1442:
1438:
1434:
1430:
1425:
1421:
1417:
1413:
1409:
1405:
1400:
1396:
1392:
1388:
1384:
1380:
1375:
1374:
1370:
1365:
1361:
1357:
1354:
1350:
1346:
1344:0-19-515598-X
1340:
1336:
1331:
1330:
1323:
1318:
1315:
1308:
1300:
1294:
1291:
1284:
1279:
1276:
1273:
1270:
1268:
1265:
1263:
1260:
1258:
1255:
1252:
1251:Arthur Cayley
1249:
1248:
1244:
1242:
1239:
1232:
1216:
1213:
1208:
1205:
1200:
1197:
1188:
1172:
1169:
1164:
1161:
1156:
1153:
1147:
1143:
1139:
1118:
1115:
1110:
1107:
1102:
1099:
1093:
1089:
1085:
1064:
1061:
1052:
1036:
1033:
1012:
1004:
989:
986:
983:
978:
974:
970:
950:
947:
944:
939:
935:
931:
923:
922:
921:
919:
911:
904:
902:
895:
892:
891:
890:
884:
882:
879:
875:
869:
867:
860:
850:
846:
839:
827:
815:
813:
806:
803:
800:
797:
796:
795:
793:
784:
777:
772:
769:
765:
762:
758:
740:
737:
734:
728:
722:
719:
716:
705:
701:
700:
696:
686:
678:
672:
664:
658:
650:
644:
636:
633:
632:
625:
617:
611:
603:
597:
589:
583:
575:
573:Left cognate
572:
571:
564:
560:
554:
550:
544:
540:
534:
530:
527:
526:
522:
519:
516:
513:
510:
509:
486:
480:
477:
469:
463:
460:
454:
449:
445:
434:
428:
425:
417:
411:
408:
402:
397:
393:
385:
384:
383:
367:
358:
351:
346:
343:
338:
332:
326:
319:
312:
306:
302:
294:
287:
280:
274:
267:
261:
255:
246:
237:
232:
228:
221:
215:
211:
200:
194:
190:
180:
171:
166:
163:
162:
161:
155:
149:
133:
121:
109:
104:
102:
98:
91:
89:
87:
83:
81:
80:Arthur Cayley
77:
73:
69:
65:
61:
60:coupler curve
57:
53:
49:
41:
35:
29:
21:
1436:
1432:
1411:
1407:
1386:
1382:
1352:
1334:
1317:
1293:
1240:
1236:
917:
916:
899:
888:
880:
876:
873:
864:
810:
789:
768:crank-rocker
767:
761:double crank
760:
703:
680:
666:
652:
638:
619:
605:
591:
577:
562:
552:
542:
532:
366:law of sines
363:
336:
330:
324:
310:
304:
300:
292:
278:
272:
265:
259:
253:
244:
235:
219:
213:
209:
198:
192:
188:
178:
169:
153:
147:
143:
99:
95:
84:
51:
45:
32:Middle row:
697:Conclusions
1309:References
48:kinematics
1140:◻
1086:◻
971:◻
932:◻
717:ℓ
528:Original
487:β
481:
470:γ
464:
435:β
429:
418:α
412:
26:Top row:
1456:Category
1355:, vol 7.
1245:See also
1217:′
1209:′
1201:′
1173:′
1165:′
1157:′
1119:′
1111:′
1103:′
1065:′
1037:′
523:Coupler
368:. Both
70:, after
56:linkages
704:Class I
520:Crank 2
517:Crank 1
511:Linkage
233:, find
1341:
706:chain
514:Ground
229:Using
1285:Notes
1339:ISBN
1132:and
963:and
847:and
729:<
375:and
269:and
242:and
205:and
176:and
74:and
54:are
1441:doi
1416:doi
1391:doi
478:sin
461:sin
426:sin
409:sin
82:).
46:In
1458::
1435:.
1431:.
1412:35
1410:.
1406:.
1387:36
1385:.
1381:.
1186:).
1002:).
790:A
322:ΔO
311:DC
298:▱O
273:DC
220:DB
207:▱O
199:DA
186:▱O
160::
154:DB
50:,
1447:.
1443::
1437:5
1422:.
1418::
1397:.
1393::
1366:.
1347:.
1230:.
1214:D
1206:B
1198:C
1170:E
1162:D
1154:C
1148:2
1144:X
1116:C
1108:B
1100:A
1094:1
1090:X
1062:C
1050:.
1034:C
1013:C
990:E
987:D
984:C
979:2
975:X
951:C
948:B
945:A
940:1
936:X
851:.
744:)
741:q
738:+
735:p
732:(
726:)
723:s
720:+
714:(
688:4
685:R
683:R
681:K
674:3
671:R
669:R
667:K
660:2
657:R
655:R
653:K
646:1
643:R
641:R
639:K
627:2
624:R
622:L
620:K
613:4
610:R
608:L
606:K
599:3
596:R
594:L
592:K
585:1
582:R
580:L
578:K
566:4
563:R
556:3
553:R
546:2
543:R
536:1
533:R
490:)
484:(
473:)
467:(
455:=
450:R
446:K
438:)
432:(
421:)
415:(
403:=
398:L
394:K
379:R
377:K
372:L
370:K
341:.
337:B
334:O
331:C
328:O
325:A
317:.
314:3
308:2
305:C
301:C
293:C
290:O
285:.
282:3
279:B
276:3
271:Δ
266:D
263:2
260:C
257:2
254:A
252:Δ
248:3
245:C
239:2
236:C
226:.
223:3
217:1
214:B
210:B
202:2
196:1
193:A
189:A
182:3
179:B
173:2
170:A
157:1
151:1
148:A
146:Δ
30:.
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.