234:
250:
406:
877:
210:
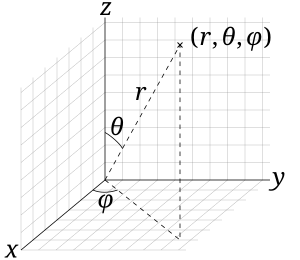
42:
993:. In the latter case, the orientation of a second (typically referred to as "local") coordinate system, fixed to the node, is defined based on the first (typically referred to as "global" or "world" coordinate system). For instance, the orientation of a rigid body can be represented by an orientation
683:
It may occur that systems of coordinates for two different sets of geometric figures are equivalent in terms of their analysis. An example of this is the systems of homogeneous coordinates for points and lines in the projective plane. The two systems in a case like this are said to be
848:. However, one of the coordinate curves is reduced to a single point, the origin, which is often viewed as a circle of radius zero. Similarly, spherical and cylindrical coordinate systems have coordinate curves that are lines, circles or circles of radius zero.
785:, if the mapping is a translation of 3 to the right, the first moves the origin from 0 to 3, so that the coordinate of each point becomes 3 less, while the second moves the origin from 0 to −3, so that the coordinate of each point becomes 3 more.
944:
is central to the theory of manifolds. A coordinate map is essentially a coordinate system for a subset of a given space with the property that each point has exactly one set of coordinates. More precisely, a coordinate map is a
688:. Dualistic systems have the property that results from one system can be carried over to the other since these results are only different interpretations of the same analytical result; this is known as the
515:
are the
Cartesian coordinates of the point. This introduces an "extra" coordinate since only two are needed to specify a point on the plane, but this system is useful in that it represents any point on the
774:
Such that the new coordinates of the image of each point are the same as the old coordinates of the original point (the formulas for the mapping are the inverse of those for the coordinate transformation)
777:
Such that the old coordinates of the image of each point are the same as the new coordinates of the original point (the formulas for the mapping are the same as those for the coordinate transformation)
896:
are the spheres with center at the origin. In three-dimensional space the intersection of two coordinate surfaces is a coordinate curve. In the
Cartesian coordinate system we may speak of
674:
are used to determine the position of a line in space. When there is a need, the type of figure being described is used to distinguish the type of coordinate system, for example the term
1019:
The Earth as a whole is one of the most common geometric spaces requiring the precise measurement of location, and thus coordinate systems. Starting with the Greeks of the
662:
Coordinates systems are often used to specify the position of a point, but they may also be used to specify the position of more complex figures such as lines, planes,
957:. It is often not possible to provide one consistent coordinate system for an entire space. In this case, a collection of coordinate maps are put together to form an
719:, which give formulas for the coordinates in one system in terms of the coordinates in another system. For example, in the plane, if Cartesian coordinates (
802:
Given a coordinate system, if one of the coordinates of a point varies while the other coordinates are held constant, then the resulting curve is called a
715:
There are often many different possible coordinate systems for describing geometrical figures. The relationship between different systems is described by
710:
568:
represents a point in the plane by the logarithm of the distance from the origin and an angle measured from a reference line intersecting the origin.
2100:
837:, all coordinates curves are lines, and, therefore, there are as many coordinate axes as coordinates. Moreover, the coordinate axes are pairwise
1174:
1164:
1577:
1518:
1411:
1346:
1321:
1290:
884:
In three-dimensional space, if one coordinate is held constant and the other two are allowed to vary, then the resulting surface is called a
331:(measured counterclockwise from the axis to the line). Then there is a unique point on this line whose signed distance from the origin is
524:. In general, a homogeneous coordinate system is one where only the ratios of the coordinates are significant and not the actual values.
278:
planes are chosen and the three coordinates of a point are the signed distances to each of the planes. This can be generalized to create
965:
and additional structure can be defined on a manifold if the structure is consistent where the coordinate maps overlap. For example, a
274:
lines are chosen and the coordinates of a point are taken to be the signed distances to the lines. In three dimensions, three mutually
2284:
1963:
1743:
1699:
1634:
1601:
1552:
1459:
1375:
704:
1184:
2165:
1001:
of three points. These points are used to define the orientation of the axes of the local system; they are the tips of three
2016:
1948:
1666:
1274:
816:
601:
396:
2041:
1058:
1027:
2387:
2279:
1661:
1104:
1062:
1048:
1031:
969:
is a manifold where the change of coordinates from one coordinate map to another is always a differentiable function.
893:
834:
400:
263:
240:
223:
46:
35:
2392:
2090:
1910:
1510:
1169:
1762:
1189:
1088:
1070:
121:. The order of the coordinates is significant, and they are sometimes identified by their position in an ordered
2264:
1716:
2346:
2218:
1925:
1014:
31:
202:, where the signed distance is the distance taken as positive or negative depending on which side of the line
145:. The use of a coordinate system allows problems in geometry to be translated into problems about numbers and
2316:
2003:
1920:
1890:
1124:
966:
581:
575:
536:
478:
306:
2274:
2130:
2085:
1114:
986:
822:
671:
571:
542:
134:
539:
are a generalization of coordinate systems generally; the system is based on the intersection of curves.
2356:
2311:
1791:
1736:
1179:
1044:
998:
852:
691:
615:
595:
591:
565:
206:
lies. Each point is given a unique coordinate and each real number is the coordinate of a unique point.
2331:
2259:
2145:
2011:
1973:
1905:
1313:
1074:
994:
585:
441:). Spherical coordinates take this a step further by converting the pair of cylindrical coordinates (
53:. It assigns three numbers (known as coordinates) to every point in Euclidean space: radial distance
347:) there is a single point, but any point is represented by many pairs of coordinates. For example, (
2208:
2031:
2021:
1870:
1855:
1811:
1150:
413:
There are two common methods for extending the polar coordinate system to three dimensions. In the
106:
2341:
2198:
2051:
1865:
1801:
1656:
1119:
1020:
623:
556:
546:
1403:
1339:
Field Theory
Handbook, Including Coordinate Systems, Differential Equations, and Their Solutions
650:
209:
2336:
2244:
2105:
2080:
1895:
1806:
1695:
1630:
1597:
1573:
1548:
1514:
1465:
1455:
1425:
1417:
1407:
1371:
1342:
1317:
1307:
1286:
1250:
1225:
1093:
870:
233:
150:
1689:
1622:
2351:
2249:
2026:
1993:
1978:
1860:
1729:
1674:
1614:
1341:(corrected 2nd, 3rd print ed.). New York: Springer-Verlag. pp. 9–11 (Table 1.01).
1145:
1140:
1098:
958:
796:
676:
643:
639:
552:
517:
267:
142:
110:
1023:, a variety of coordinate systems have been developed based on the types above, including:
2321:
2269:
2213:
2193:
2095:
1983:
1850:
1821:
1447:
1443:
1109:
1065:
that models the earth as an object, and are most commonly used for modeling the orbits of
876:
294:
173:
118:
739:
axis, then the coordinate transformation from polar to
Cartesian coordinates is given by
405:
249:
2361:
2326:
2306:
2223:
2056:
2046:
2036:
1958:
1930:
1915:
1900:
1816:
1685:
1498:
1396:
1391:
1129:
1052:
925:
844:
A polar coordinate system is a curvilinear system where coordinate curves are lines or
138:
1228:
574:
are a way of representing lines in 3D Euclidean space using a six-tuple of numbers as
2381:
2298:
2203:
2115:
1988:
1364:
946:
807:
275:
271:
2366:
2170:
2155:
2120:
1968:
1953:
1618:
605:
985:, coordinate systems are used to describe the (linear) position of points and the
851:
Many curves can occur as coordinate curves. For example, the coordinate curves of
1253:
814:. A coordinate system for which some coordinate curves are not lines is called a
172:
The simplest example of a coordinate system is the identification of points on a
2254:
2228:
2150:
1839:
1778:
1282:
1002:
829:
A coordinate line with all other constant coordinates equal to zero is called a
178:
167:
130:
17:
379:) are all polar coordinates for the same point. The pole is represented by (0,
2135:
990:
982:
838:
631:
421:-coordinate with the same meaning as in Cartesian coordinates is added to the
327:, there is a single line through the pole whose angle with the polar axis is
2110:
2061:
1258:
1233:
1066:
1039:
782:
767:
627:
1429:
770:
from the space to itself two coordinate transformations can be associated:
41:
2140:
2125:
1502:
1134:
1035:
978:
931:
856:
680:
is used for any coordinate system that specifies the position of a line.
609:
521:
114:
90:
1834:
1796:
1362:
Finney, Ross; George Thomas; Franklin Demana; Bert Waits (June 1994).
880:
Coordinate surfaces of the three-dimensional paraboloidal coordinates.
2160:
1752:
845:
667:
663:
98:
961:
covering the space. A space equipped with such an atlas is called a
912:-dimensional spaces resulting from fixing a single coordinate of an
826:
are a special but extremely common case of curvilinear coordinates.
1629:. American Institute of Aeronautics and Astronautics. p. 71.
1370:(Single Variable Version ed.). Addison-Wesley Publishing Co.
875:
122:
62:
40:
1570:
A Computational
Differential Geometry Approach to Grid Generation
1469:
1421:
1337:
Moon P, Spencer DE (1988). "Rectangular
Coordinates (x, y, z)".
1725:
622:
There are ways of describing curves without coordinates, using
30:"Coordinate" redirects here. For coordinates on the Earth, see
78:
70:
208:
1507:
Methods of
Algebraic Geometry, Volume I (Book II)
1137:, graphical representations of different coordinate systems
888:. For example, the coordinate surfaces obtained by holding
869:"Coordinate plane" redirects here. Not to be confused with
735:) have the same origin, and the polar axis is the positive
1721:
795:"Coordinate line" redirects here. Not to be confused with
255:
The
Cartesian coordinate system in three-dimensional space
532:
Some other common coordinate systems are the following:
262:
The prototypical example of a coordinate system is the
190:) is chosen on a given line. The coordinate of a point
1306:
Anton, Howard; Bivens, Irl C.; Davis, Stephen (2021).
311:
Another common coordinate system for the plane is the
1055:
to create a planar surface of the world or a region.
2297:
2237:
2186:
2179:
2071:
2002:
1939:
1883:
1830:
1777:
1770:
1395:
1363:
1545:Mathematical Methods for Engineers and Scientists
141:or elements of a more abstract system such as a
129:-coordinate". The coordinates are taken to be
1737:
8:
1655:Voitsekhovskii, M.I.; Ivanov, A.B. (2001) ,
997:, which includes, in its three columns, the
391:Cylindrical and spherical coordinate systems
289:Depending on the direction and order of the
483:A point in the plane may be represented in
2183:
1774:
1744:
1730:
1722:
1402:. New York City: D. van Nostrand. p.
319:and a ray from this point is taken as the
1366:Calculus: Graphical, Numerical, Algebraic
1277:; Redlin, Lothar; Watson, Saleem (2008).
711:List of common coordinate transformations
2101:Covariance and contravariance of vectors
1398:The Mathematics of Physics and Chemistry
404:
293:, the three-dimensional system may be a
1485:An Introduction to Algebraical Geometry
1207:
194:is defined as the signed distance from
1454:. New York: McGraw-Hill. p. 658.
1452:Methods of Theoretical Physics, Part I
626:that use invariant quantities such as
608:and more generally in the analysis of
125:and sometimes by a letter, as in "the
1627:Analytical Mechanics of Space Systems
1547:. Vol. 2. Springer. p. 13.
618:are used in the context of triangles.
182:. In this system, an arbitrary point
27:Method for specifying point positions
7:
290:
429:polar coordinates giving a triple (
339:. For a given pair of coordinates (
1964:Tensors in curvilinear coordinates
97:is a system that uses one or more
25:
1684:Shigeyuki Morita; Teruko Nagase;
1165:Eddington–Finkelstein coordinates
705:Active and passive transformation
653:relates arc length and curvature.
113:or other geometric elements on a
916:-dimensional coordinate system.
658:Coordinates of geometric objects
248:
232:
1175:Gullstrand–Painlevé coordinates
1158:Relativistic coordinate systems
949:from an open subset of a space
1691:Geometry of Differential Forms
1568:Liseikin, Vladimir D. (2007).
1483:Jones, Alfred Clement (1912).
286:-dimensional Euclidean space.
1:
2017:Exterior covariant derivative
1949:Tensor (intrinsic definition)
1694:. AMS Bookstore. p. 12.
973:Orientation-based coordinates
817:curvilinear coordinate system
806:. If a coordinate curve is a
602:Barycentric coordinate system
473:Homogeneous coordinate system
415:cylindrical coordinate system
409:Cylindrical coordinate system
397:Cylindrical coordinate system
282:coordinates for any point in
2042:Raising and lowering indices
1717:Hexagonal Coordinate Systems
1679:. Ginn and Co. pp. 1ff.
1673:Woods, Frederick S. (1922).
1394:; Murphy, George M. (1956).
1185:Kruskal–Szekeres coordinates
1059:Geocentric coordinate system
1049:cartesian coordinate systems
1045:Projected coordinate systems
1028:Geographic coordinate system
176:with real numbers using the
105:, to uniquely determine the
2280:Gluon field strength tensor
1662:Encyclopedia of Mathematics
1105:Celestial coordinate system
1063:cartesian coordinate system
894:spherical coordinate system
835:Cartesian coordinate system
642:relates arc length and the
566:log-polar coordinate system
528:Other commonly used systems
401:Spherical coordinate system
315:. A point is chosen as the
264:Cartesian coordinate system
241:Cartesian coordinate system
224:Cartesian coordinate system
218:Cartesian coordinate system
81:) is often used instead of
47:spherical coordinate system
36:Coordinate (disambiguation)
2409:
2091:Cartan formalism (physics)
1911:Penrose graphical notation
1511:Cambridge University Press
1170:Gaussian polar coordinates
1012:
929:
923:
868:
863:Coordinate planes/surfaces
794:
717:coordinate transformations
708:
702:
476:
394:
304:
221:
165:
29:
1763:Glossary of tensor theory
1759:
1592:Munkres, James R. (2000)
1190:Schwarzschild coordinates
1089:Absolute angular momentum
1071:Global Positioning System
1047:, including thousands of
1005:aligned with those axes.
727:) and polar coordinates (
297:or a left-handed system.
157:Common coordinate systems
2347:Gregorio Ricci-Curbastro
2219:Riemann curvature tensor
1926:Van der Waerden notation
1572:. Springer. p. 38.
1015:Spatial reference system
902:coordinate hypersurfaces
449:) to polar coordinates (
32:Spatial reference system
2317:Elwin Bruno Christoffel
2250:Angular momentum tensor
1921:Tetrad (index notation)
1891:Abstract index notation
1623:"Rigid body kinematics"
1309:Calculus: Multivariable
1125:Galilean transformation
967:differentiable manifold
789:Coordinate lines/curves
598:treatment of mechanics.
588:treatment of mechanics.
582:Generalized coordinates
576:homogeneous coordinates
537:Curvilinear coordinates
485:homogeneous coordinates
479:Homogeneous coordinates
313:polar coordinate system
307:Polar coordinate system
301:Polar coordinate system
149:; this is the basis of
65:), and azimuthal angle
2131:Levi-Civita connection
1115:Fractional coordinates
1061:, a three-dimensional
881:
823:Orthogonal coordinates
543:Orthogonal coordinates
410:
214:
135:elementary mathematics
86:
34:. For other uses, see
2357:Jan Arnoldus Schouten
2312:Augustin-Louis Cauchy
1792:Differential geometry
1314:John Wiley & Sons
1180:Isotropic coordinates
1032:spherical coordinates
999:Cartesian coordinates
989:of axes, planes, and
953:to an open subset of
930:Further information:
879:
853:parabolic coordinates
616:Trilinear coordinates
592:Canonical coordinates
408:
212:
44:
2332:Carl Friedrich Gauss
2265:stress–energy tensor
2260:Cauchy stress tensor
2012:Covariant derivative
1974:Antisymmetric tensor
1906:Multi-index notation
1543:Tang, K. T. (2006).
1075:satellite navigation
549:meet at right angles
323:. For a given angle
49:is commonly used in
2209:Nonmetricity tensor
2064:(2nd-order tensors)
2032:Hodge star operator
2022:Exterior derivative
1871:Transport phenomena
1856:Continuum mechanics
1812:Multilinear algebra
1229:"Coordinate System"
1151:Translation of axes
672:Plücker coordinates
624:intrinsic equations
572:Plücker coordinates
557:coordinate surfaces
547:coordinate surfaces
520:without the use of
457:) giving a triple (
383:) for any value of
2388:Coordinate systems
2342:Tullio Levi-Civita
2285:Metric tensor (GR)
2199:Levi-Civita symbol
2052:Tensor contraction
1866:General relativity
1802:Euclidean geometry
1285:. pp. 13–19.
1251:Weisstein, Eric W.
1226:Weisstein, Eric W.
1120:Frame of reference
1051:, each based on a
1021:Hellenistic period
1009:Geographic systems
886:coordinate surface
882:
559:are not orthogonal
411:
215:
87:
2393:Analytic geometry
2375:
2374:
2337:Hermann Grassmann
2293:
2292:
2245:Moment of inertia
2106:Differential form
2081:Affine connection
1896:Einstein notation
1879:
1878:
1807:Exterior calculus
1787:Coordinate system
1596:. Prentice Hall.
1579:978-3-540-34235-9
1520:978-0-521-46900-5
1413:978-0-88275-423-9
1348:978-0-387-18430-2
1323:978-1-119-77798-4
1292:978-0-495-56521-5
1275:Stewart, James B.
1094:Alphanumeric grid
936:The concept of a
898:coordinate planes
871:Plane coordinates
810:, it is called a
634:. These include:
335:for given number
151:analytic geometry
95:coordinate system
16:(Redirected from
2400:
2352:Bernhard Riemann
2184:
2027:Exterior product
1994:Two-point tensor
1979:Symmetric tensor
1861:Electromagnetism
1775:
1746:
1739:
1732:
1723:
1705:
1680:
1669:
1641:
1640:
1615:Hanspeter Schaub
1611:
1605:
1590:
1584:
1583:
1565:
1559:
1558:
1540:
1534:
1531:
1525:
1524:
1495:
1489:
1488:
1480:
1474:
1473:
1440:
1434:
1433:
1401:
1388:
1382:
1381:
1369:
1359:
1353:
1352:
1334:
1328:
1327:
1303:
1297:
1296:
1281:(5th ed.).
1271:
1265:
1264:
1263:
1246:
1240:
1239:
1238:
1221:
1215:
1212:
1146:Rotation of axes
1141:Reference system
1099:Axes conventions
1069:, including the
987:angular position
942:coordinate chart
911:
892:constant in the
804:coordinate curve
797:Line coordinates
781:For example, in
677:line coordinates
644:tangential angle
640:Whewell equation
594:are used in the
584:are used in the
553:Skew coordinates
518:projective plane
252:
236:
143:commutative ring
21:
18:Image coordinate
2408:
2407:
2403:
2402:
2401:
2399:
2398:
2397:
2378:
2377:
2376:
2371:
2322:Albert Einstein
2289:
2270:Einstein tensor
2233:
2214:Ricci curvature
2194:Kronecker delta
2180:Notable tensors
2175:
2096:Connection form
2073:
2067:
1998:
1984:Tensor operator
1941:
1935:
1875:
1851:Computer vision
1844:
1826:
1822:Tensor calculus
1766:
1755:
1750:
1713:
1708:
1702:
1683:
1676:Higher Geometry
1672:
1654:
1650:
1645:
1644:
1637:
1619:John L. Junkins
1613:
1612:
1608:
1591:
1587:
1580:
1567:
1566:
1562:
1555:
1542:
1541:
1537:
1532:
1528:
1521:
1497:
1496:
1492:
1482:
1481:
1477:
1462:
1442:
1441:
1437:
1414:
1392:Margenau, Henry
1390:
1389:
1385:
1378:
1361:
1360:
1356:
1349:
1336:
1335:
1331:
1324:
1316:. p. 657.
1305:
1304:
1300:
1293:
1279:College Algebra
1273:
1272:
1268:
1249:
1248:
1247:
1243:
1224:
1223:
1222:
1218:
1213:
1209:
1204:
1199:
1194:
1160:
1155:
1110:Coordinate-free
1084:
1017:
1011:
975:
934:
928:
922:
920:Coordinate maps
905:
874:
865:
831:coordinate axis
812:coordinate line
800:
791:
713:
707:
701:
699:Transformations
670:. For example,
660:
651:Cesàro equation
530:
481:
475:
403:
395:Main articles:
393:
309:
303:
291:coordinate axes
260:
259:
258:
257:
256:
253:
245:
244:
237:
226:
220:
213:The number line
170:
164:
159:
139:complex numbers
119:Euclidean space
39:
28:
23:
22:
15:
12:
11:
5:
2406:
2404:
2396:
2395:
2390:
2380:
2379:
2373:
2372:
2370:
2369:
2364:
2362:Woldemar Voigt
2359:
2354:
2349:
2344:
2339:
2334:
2329:
2327:Leonhard Euler
2324:
2319:
2314:
2309:
2303:
2301:
2299:Mathematicians
2295:
2294:
2291:
2290:
2288:
2287:
2282:
2277:
2272:
2267:
2262:
2257:
2252:
2247:
2241:
2239:
2235:
2234:
2232:
2231:
2226:
2224:Torsion tensor
2221:
2216:
2211:
2206:
2201:
2196:
2190:
2188:
2181:
2177:
2176:
2174:
2173:
2168:
2163:
2158:
2153:
2148:
2143:
2138:
2133:
2128:
2123:
2118:
2113:
2108:
2103:
2098:
2093:
2088:
2083:
2077:
2075:
2069:
2068:
2066:
2065:
2059:
2057:Tensor product
2054:
2049:
2047:Symmetrization
2044:
2039:
2037:Lie derivative
2034:
2029:
2024:
2019:
2014:
2008:
2006:
2000:
1999:
1997:
1996:
1991:
1986:
1981:
1976:
1971:
1966:
1961:
1959:Tensor density
1956:
1951:
1945:
1943:
1937:
1936:
1934:
1933:
1931:Voigt notation
1928:
1923:
1918:
1916:Ricci calculus
1913:
1908:
1903:
1901:Index notation
1898:
1893:
1887:
1885:
1881:
1880:
1877:
1876:
1874:
1873:
1868:
1863:
1858:
1853:
1847:
1845:
1843:
1842:
1837:
1831:
1828:
1827:
1825:
1824:
1819:
1817:Tensor algebra
1814:
1809:
1804:
1799:
1797:Dyadic algebra
1794:
1789:
1783:
1781:
1772:
1768:
1767:
1760:
1757:
1756:
1751:
1749:
1748:
1741:
1734:
1726:
1720:
1719:
1712:
1711:External links
1709:
1707:
1706:
1700:
1686:Katsumi Nomizu
1681:
1670:
1651:
1649:
1646:
1643:
1642:
1635:
1606:
1585:
1578:
1560:
1553:
1535:
1526:
1519:
1490:
1475:
1460:
1435:
1412:
1383:
1376:
1354:
1347:
1329:
1322:
1298:
1291:
1266:
1241:
1216:
1206:
1205:
1203:
1200:
1198:
1195:
1193:
1192:
1187:
1182:
1177:
1172:
1167:
1161:
1159:
1156:
1154:
1153:
1148:
1143:
1138:
1132:
1130:Grid reference
1127:
1122:
1117:
1112:
1107:
1102:
1101:in engineering
1096:
1091:
1085:
1083:
1080:
1079:
1078:
1056:
1053:map projection
1042:
1013:Main article:
1010:
1007:
974:
971:
938:coordinate map
926:Coordinate map
924:Main article:
921:
918:
864:
861:
790:
787:
779:
778:
775:
709:Main article:
700:
697:
659:
656:
655:
654:
647:
620:
619:
613:
599:
589:
579:
569:
562:
561:
560:
550:
529:
526:
477:Main article:
474:
471:
392:
389:
305:Main article:
302:
299:
254:
247:
246:
238:
231:
230:
229:
228:
227:
222:Main article:
219:
216:
166:Main article:
163:
160:
158:
155:
73:). The symbol
57:, polar angle
26:
24:
14:
13:
10:
9:
6:
4:
3:
2:
2405:
2394:
2391:
2389:
2386:
2385:
2383:
2368:
2365:
2363:
2360:
2358:
2355:
2353:
2350:
2348:
2345:
2343:
2340:
2338:
2335:
2333:
2330:
2328:
2325:
2323:
2320:
2318:
2315:
2313:
2310:
2308:
2305:
2304:
2302:
2300:
2296:
2286:
2283:
2281:
2278:
2276:
2273:
2271:
2268:
2266:
2263:
2261:
2258:
2256:
2253:
2251:
2248:
2246:
2243:
2242:
2240:
2236:
2230:
2227:
2225:
2222:
2220:
2217:
2215:
2212:
2210:
2207:
2205:
2204:Metric tensor
2202:
2200:
2197:
2195:
2192:
2191:
2189:
2185:
2182:
2178:
2172:
2169:
2167:
2164:
2162:
2159:
2157:
2154:
2152:
2149:
2147:
2144:
2142:
2139:
2137:
2134:
2132:
2129:
2127:
2124:
2122:
2119:
2117:
2116:Exterior form
2114:
2112:
2109:
2107:
2104:
2102:
2099:
2097:
2094:
2092:
2089:
2087:
2084:
2082:
2079:
2078:
2076:
2070:
2063:
2060:
2058:
2055:
2053:
2050:
2048:
2045:
2043:
2040:
2038:
2035:
2033:
2030:
2028:
2025:
2023:
2020:
2018:
2015:
2013:
2010:
2009:
2007:
2005:
2001:
1995:
1992:
1990:
1989:Tensor bundle
1987:
1985:
1982:
1980:
1977:
1975:
1972:
1970:
1967:
1965:
1962:
1960:
1957:
1955:
1952:
1950:
1947:
1946:
1944:
1938:
1932:
1929:
1927:
1924:
1922:
1919:
1917:
1914:
1912:
1909:
1907:
1904:
1902:
1899:
1897:
1894:
1892:
1889:
1888:
1886:
1882:
1872:
1869:
1867:
1864:
1862:
1859:
1857:
1854:
1852:
1849:
1848:
1846:
1841:
1838:
1836:
1833:
1832:
1829:
1823:
1820:
1818:
1815:
1813:
1810:
1808:
1805:
1803:
1800:
1798:
1795:
1793:
1790:
1788:
1785:
1784:
1782:
1780:
1776:
1773:
1769:
1765:
1764:
1758:
1754:
1747:
1742:
1740:
1735:
1733:
1728:
1727:
1724:
1718:
1715:
1714:
1710:
1703:
1701:0-8218-1045-6
1697:
1693:
1692:
1687:
1682:
1678:
1677:
1671:
1668:
1664:
1663:
1658:
1657:"Coordinates"
1653:
1652:
1647:
1638:
1636:1-56347-563-4
1632:
1628:
1624:
1620:
1616:
1610:
1607:
1603:
1602:0-13-181629-2
1599:
1595:
1589:
1586:
1581:
1575:
1571:
1564:
1561:
1556:
1554:3-540-30268-9
1550:
1546:
1539:
1536:
1530:
1527:
1522:
1516:
1512:
1508:
1504:
1500:
1499:Hodge, W.V.D.
1494:
1491:
1486:
1479:
1476:
1471:
1467:
1463:
1461:0-07-043316-X
1457:
1453:
1449:
1445:
1439:
1436:
1431:
1427:
1423:
1419:
1415:
1409:
1405:
1400:
1399:
1393:
1387:
1384:
1379:
1377:0-201-55478-X
1373:
1368:
1367:
1358:
1355:
1350:
1344:
1340:
1333:
1330:
1325:
1319:
1315:
1311:
1310:
1302:
1299:
1294:
1288:
1284:
1280:
1276:
1270:
1267:
1261:
1260:
1255:
1254:"Coordinates"
1252:
1245:
1242:
1236:
1235:
1230:
1227:
1220:
1217:
1211:
1208:
1201:
1196:
1191:
1188:
1186:
1183:
1181:
1178:
1176:
1173:
1171:
1168:
1166:
1163:
1162:
1157:
1152:
1149:
1147:
1144:
1142:
1139:
1136:
1133:
1131:
1128:
1126:
1123:
1121:
1118:
1116:
1113:
1111:
1108:
1106:
1103:
1100:
1097:
1095:
1092:
1090:
1087:
1086:
1081:
1076:
1072:
1068:
1064:
1060:
1057:
1054:
1050:
1046:
1043:
1041:
1037:
1033:
1029:
1026:
1025:
1024:
1022:
1016:
1008:
1006:
1004:
1000:
996:
992:
988:
984:
980:
972:
970:
968:
964:
960:
956:
952:
948:
947:homeomorphism
943:
939:
933:
927:
919:
917:
915:
909:
903:
900:. Similarly,
899:
895:
891:
887:
878:
872:
867:
862:
860:
858:
854:
849:
847:
842:
840:
836:
832:
827:
825:
824:
819:
818:
813:
809:
808:straight line
805:
798:
793:
788:
786:
784:
776:
773:
772:
771:
769:
764:
762:
758:
755: =
754:
750:
746:
743: =
742:
738:
734:
730:
726:
722:
718:
712:
706:
698:
696:
694:
693:
690:principle of
687:
681:
679:
678:
673:
669:
665:
657:
652:
648:
645:
641:
637:
636:
635:
633:
629:
625:
617:
614:
611:
607:
606:ternary plots
603:
600:
597:
593:
590:
587:
583:
580:
577:
573:
570:
567:
563:
558:
554:
551:
548:
544:
541:
540:
538:
535:
534:
533:
527:
525:
523:
519:
514:
510:
506:
502:
498:
494:
490:
487:by a triple (
486:
480:
472:
470:
468:
464:
460:
456:
452:
448:
444:
440:
436:
432:
428:
424:
420:
416:
407:
402:
398:
390:
388:
386:
382:
378:
374:
370:
366:
362:
358:
354:
350:
346:
342:
338:
334:
330:
326:
322:
318:
314:
308:
300:
298:
296:
292:
287:
285:
281:
277:
273:
272:perpendicular
269:
265:
251:
242:
235:
225:
217:
211:
207:
205:
201:
197:
193:
189:
185:
181:
180:
175:
169:
161:
156:
154:
152:
148:
144:
140:
137:, but may be
136:
132:
128:
124:
120:
116:
112:
108:
104:
100:
96:
92:
84:
80:
76:
72:
68:
64:
60:
56:
52:
48:
43:
37:
33:
19:
2367:Hermann Weyl
2171:Vector space
2156:Pseudotensor
2121:Fiber bundle
2074:abstractions
1969:Mixed tensor
1954:Tensor field
1786:
1761:
1690:
1675:
1660:
1626:
1609:
1593:
1588:
1569:
1563:
1544:
1538:
1529:
1506:
1493:
1487:. Clarendon.
1484:
1478:
1451:
1438:
1397:
1386:
1365:
1357:
1338:
1332:
1308:
1301:
1278:
1269:
1257:
1244:
1232:
1219:
1210:
1018:
1003:unit vectors
991:rigid bodies
976:
962:
954:
950:
941:
937:
935:
913:
907:
901:
897:
889:
885:
883:
866:
850:
843:
830:
828:
821:
815:
811:
803:
801:
792:
780:
765:
760:
756:
752:
748:
744:
740:
736:
732:
728:
724:
720:
716:
714:
689:
685:
682:
675:
661:
621:
604:as used for
531:
512:
508:
504:
500:
496:
492:
488:
484:
482:
466:
462:
458:
454:
450:
446:
442:
438:
434:
430:
426:
422:
418:
414:
412:
384:
380:
376:
372:
368:
364:
360:
356:
352:
348:
344:
340:
336:
332:
328:
324:
320:
316:
312:
310:
295:right-handed
288:
283:
279:
261:
243:in the plane
203:
199:
195:
191:
187:
183:
177:
171:
146:
131:real numbers
126:
102:
94:
88:
82:
74:
66:
58:
54:
50:
2307:Élie Cartan
2255:Spin tensor
2229:Weyl tensor
2187:Mathematics
2151:Multivector
1942:definitions
1840:Engineering
1779:Mathematics
1448:Feshbach, H
1283:Brooks Cole
766:With every
596:Hamiltonian
179:number line
168:Number line
162:Number line
103:coordinates
2382:Categories
2136:Linear map
2004:Operations
1533:Woods p. 2
1214:Woods p. 1
1197:References
1073:and other
1067:satellites
983:kinematics
839:orthogonal
703:See also:
632:arc length
586:Lagrangian
321:polar axis
276:orthogonal
147:vice versa
2275:EM tensor
2111:Dimension
2062:Transpose
1667:EMS Press
1505:(1994) .
1444:Morse, PM
1259:MathWorld
1234:MathWorld
1202:Citations
1040:longitude
857:parabolas
768:bijection
759: sin
747: cos
686:dualistic
628:curvature
610:triangles
266:. In the
2141:Manifold
2126:Geodesic
1884:Notation
1688:(2001).
1621:(2003).
1594:Topology
1503:D. Pedoe
1470:52011515
1450:(1953).
1422:55010911
1135:Nomogram
1082:See also
1077:systems.
1036:latitude
979:geometry
963:manifold
932:Manifold
904:are the
833:. In a
522:infinity
499:) where
367:) and (−
117:such as
115:manifold
107:position
91:geometry
2238:Physics
2072:Related
1835:Physics
1753:Tensors
1648:Sources
1430:3017486
846:circles
731:,
723:,
692:duality
668:spheres
664:circles
495:,
491:,
465:,
461:,
453:,
445:,
437:,
433:,
371:,
359:,
351:,
343:,
109:of the
99:numbers
51:physics
2166:Vector
2161:Spinor
2146:Matrix
1940:Tensor
1698:
1633:
1600:
1576:
1551:
1517:
1468:
1458:
1428:
1420:
1410:
1374:
1345:
1320:
1289:
1030:, the
995:matrix
270:, two
188:origin
111:points
2086:Basis
1771:Scope
959:atlas
940:, or
268:plane
186:(the
123:tuple
101:, or
63:theta
1696:ISBN
1631:ISBN
1598:ISBN
1574:ISBN
1549:ISBN
1515:ISBN
1466:LCCN
1456:ISBN
1426:OCLC
1418:LCCN
1408:ISBN
1372:ISBN
1343:ISBN
1318:ISBN
1287:ISBN
1038:and
981:and
910:− 1)
855:are
751:and
649:The
638:The
630:and
564:The
507:and
425:and
417:, a
399:and
355:), (
317:pole
239:The
174:line
93:, a
45:The
1404:178
1034:of
977:In
841:.
666:or
469:).
198:to
133:in
89:In
79:rho
71:phi
2384::
1665:,
1659:,
1625:.
1617:;
1513:.
1509:.
1501:;
1464:.
1446:;
1424:.
1416:.
1406:.
1312:.
1256:.
1231:.
859:.
820:.
783:1D
763:.
695:.
555::
545::
387:.
363:+2
153:.
1745:e
1738:t
1731:v
1704:.
1639:.
1604:.
1582:.
1557:.
1523:.
1472:.
1432:.
1380:.
1351:.
1326:.
1295:.
1262:.
1237:.
955:R
951:X
914:n
908:n
906:(
890:ρ
873:.
799:.
761:θ
757:r
753:y
749:θ
745:r
741:x
737:x
733:θ
729:r
725:y
721:x
646:.
612:.
578:.
513:z
511:/
509:y
505:z
503:/
501:x
497:z
493:y
489:x
467:φ
463:θ
459:ρ
455:φ
451:ρ
447:z
443:r
439:z
435:θ
431:r
427:θ
423:r
419:z
385:θ
381:θ
377:π
375:+
373:θ
369:r
365:π
361:θ
357:r
353:θ
349:r
345:θ
341:r
337:r
333:r
329:θ
325:θ
284:n
280:n
204:P
200:P
196:O
192:P
184:O
127:x
85:.
83:r
77:(
75:ρ
69:(
67:φ
61:(
59:θ
55:r
38:.
20:)
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.