50:
62:
20:
35:
657:
Two or more rigid bodies in space are collectively called a rigid body system. We can hinder the motion of these independent rigid bodies with kinematic constraints. Kinematic constraints are constraints between rigid bodies that result in the decrease of the degrees of freedom of rigid body system.
446:
to characterize the relative movement allowed at each joint and separate rigid transformations to define the dimensions of each link. In the case of a serial open chain, the result is a sequence of rigid transformations alternating joint and link transformations from the base of the chain to its
182:
degrees of freedom measured relative to a fixed frame. This frame is included in the count of bodies, so that mobility does not depend on link that forms the fixed frame. This means the degree-of-freedom of this system is
414:
208:
Joints that connect bodies impose constraints. Specifically, hinges and sliders each impose five constraints and therefore remove five degrees of freedom. It is convenient to define the number of constraints
97:
suggests, the rigid bodies, or links, are constrained by their connections to other links. An example is the simple open chain formed by links connected in series, like the usual chain, which is the
602:
Kinematic chains of a wide range of complexity are analyzed by equating the kinematics equations of serial chains that form loops within the kinematic chain. These equations are often called
666:
The constraint equations of a kinematic chain can be used in reverse to determine the dimensions of the links from a specification of the desired movement of the system. This is termed
595:
where is the transformation locating the end-link—notice that the chain includes a "zeroth" link consisting of the ground frame to which it is attached. These equations are called the
590:
720:
431:
The constraint equations of a kinematic chain couple the range of movement allowed at each joint to the dimensions of the links in the chain, and form
283:
896:
Sandor, G.N., and Erdman, A.G., 1984, Advanced
Mechanism Design: Analysis and Synthesis, Vol. 2. Prentice-Hall, Englewood Cliffs, NJ.
715:
950:
143:
The modern use of kinematic chains includes compliance that arises from flexure joints in precision mechanisms, link compliance in
798:
148:
935:
436:
164:
39:
930:
725:
960:
435:
that are solved to determine the configuration of the chain associated with specific values of input parameters, called
925:
940:
945:
778:
755:
735:
65:
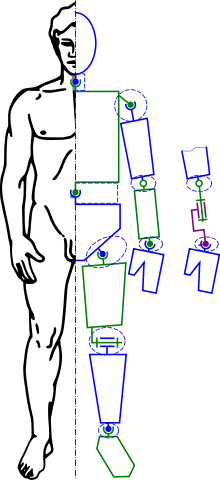
A model of the human skeleton as a kinematic chain allows positioning using forward and inverse kinematics.
750:
683:
70:
171:
of a kinematic chain is the number of parameters that define the configuration of the chain. A system of
695:
133:
730:
687:
626:
443:
102:
686:
is often called the father of modern kinematics for his contributions to the kinematic synthesis of
630:
432:
144:
61:
49:
641:
614:
610:
596:
457:
86:
19:
955:
137:
90:
82:
54:
677:
673:
745:
740:
232:
121:
774:
645:
109:
919:
701:
This work has been generalized to the synthesis of spherical and spatial mechanisms.
57:
is studied as a system of rigid bodies connected by joints forming a kinematic chain.
447:
end link, which is equated to the specified position for the end link. A chain of
634:
27:
826:
813:
710:
108:
Mathematical models of the connections, or joints, between two links are termed
783:(trans. and annotated by A. B. W. Kennedy), reprinted by Dover, New York (1963)
152:
78:
98:
409:{\displaystyle M=6n-\sum _{i=1}^{j}(6-f_{i})=6(N-1-j)+\sum _{i=1}^{j}f_{i}}
34:
690:
beginning in the 1950s. His use of the newly developed computer to solve
622:
113:
42:
140:
is a schematic of the mechanical system that shows the kinematic chain.
112:. Kinematic pairs model the hinged and sliding joints fundamental to
672:
Perhaps the most developed formulation of kinematic synthesis is for
442:
The constraint equations for a kinematic chain are obtained using
228:
94:
60:
48:
30:
ATHLETE is a platform with six serial chain legs ending in wheels.
252:
The result is that the mobility of a kinematic chain formed from
125:
24:
617:) of the chain is determined by the following factors:
451:
links connected in series has the kinematic equations,
841:
J. J. Uicker, G. R. Pennock, and J. E. Shigley, 2003,
460:
286:
213:
that a joint imposes in terms of the joint's freedom
205:
is the number of moving bodies plus the fixed body.
584:
408:
581:
866:
864:
235:, which are one-degree-of-freedom joints, have
793:
791:
789:
8:
837:
835:
609:The complexity (in terms of calculating the
151:, and cable compliance in cable robotic and
120:and the surface contact joints critical to
85:to provide constrained motion that is the
16:Mathematical model for a mechanical system
909:, Oxford Engineering Science Series, 1979
569:
547:
528:
512:
496:
480:
459:
400:
390:
379:
336:
317:
306:
285:
33:
18:
870:R. S. Hartenberg and J. Denavit, 1964,
856:Introduction to Theoretical Kinematics,
767:
887:, John Wiley and Sons, New York, 1978.
132:These joints are generally modeled as
7:
858:MIT Press, Cambridge, Massachusetts.
797:J. M. McCarthy and G. S. Soh, 2010,
721:Chebychev–Grübler–Kutzbach criterion
38:The arms, fingers, and head of the
883:Suh, C. H., and Radcliffe, C. W.,
845:Oxford University Press, New York.
843:Theory of Machines and Mechanisms,
648:spatially connected to each other?
14:
175:rigid bodies moving in space has
907:Kinematic Geometry of Mechanisms
872:Kinematic Synthesis of Linkages,
149:micro-electro-mechanical systems
45:are modeled as kinematic chains.
885:Kinematics and Mechanism Design
599:equations of the serial chain.
55:Boulton & Watt steam engine
575:
562:
559:
540:
534:
521:
518:
505:
502:
489:
486:
473:
467:
461:
369:
351:
342:
323:
1:
800:Geometric Design of Linkages,
716:Denavit–Hartenberg parameters
662:Synthesis of kinematic chains
780:The Kinematics of Machinery,
427:Analysis of kinematic chains
644:form: how are neighbouring
585:{\displaystyle =\cdots ,\!}
977:
260:joints each with freedom
101:model for a typical robot
423:includes the fixed link.
951:Mechanisms (engineering)
827:Precision Machine Design
825:Alexander Slocum, 1992,
816:, John Wiley & Sons.
694:became the prototype of
812:Larry L. Howell, 2001,
756:Superposition principle
736:Mechanism (engineering)
692:Freudenstein's equation
874:McGraw-Hill, New York.
854:J. M. McCarthy, 1990,
751:Six degrees of freedom
684:Ferdinand Freudenstein
586:
410:
395:
322:
71:mechanical engineering
66:
58:
46:
31:
936:Computational physics
696:computer-aided design
587:
444:rigid transformations
411:
375:
302:
134:holonomic constraints
64:
52:
37:
22:
931:3D computer graphics
814:Compliant mechanisms
731:Machine (mechanical)
676:, which is known as
668:kinematic synthesis.
627:parallel manipulator
625:: a serial chain, a
458:
284:
145:compliant mechanisms
53:The movement of the
961:Classical mechanics
803:Springer, New York.
726:Configuration space
433:algebraic equations
227:. In the case of a
615:inverse kinematics
597:forward kinematics
582:
437:degrees of freedom
406:
165:degrees of freedom
87:mathematical model
77:is an assembly of
67:
59:
47:
32:
926:Computer graphics
674:four-bar linkages
256:moving links and
138:kinematic diagram
91:mechanical system
968:
941:Robot kinematics
910:
903:
897:
894:
888:
881:
875:
868:
859:
852:
846:
839:
830:
823:
817:
810:
804:
795:
784:
772:
678:Burmester theory
633:structure, or a
591:
589:
588:
583:
574:
573:
558:
557:
533:
532:
517:
516:
501:
500:
485:
484:
450:
422:
415:
413:
412:
407:
405:
404:
394:
389:
341:
340:
321:
316:
276:
266:
259:
255:
248:
241:
226:
216:
212:
204:
193:
181:
174:
159:Mobility formula
976:
975:
971:
970:
969:
967:
966:
965:
946:Virtual reality
916:
915:
914:
913:
904:
900:
895:
891:
882:
878:
869:
862:
853:
849:
840:
833:
824:
820:
811:
807:
796:
787:
773:
769:
764:
746:Simple machines
741:Six-bar linkage
707:
664:
565:
543:
524:
508:
492:
476:
456:
455:
448:
429:
420:
396:
332:
282:
281:
268:
265:
261:
257:
253:
243:
236:
218:
214:
210:
195:
184:
176:
172:
161:
116:, often called
110:kinematic pairs
93:. As the word
75:kinematic chain
17:
12:
11:
5:
974:
972:
964:
963:
958:
953:
948:
943:
938:
933:
928:
918:
917:
912:
911:
898:
889:
876:
860:
847:
831:
818:
805:
785:
766:
765:
763:
760:
759:
758:
753:
748:
743:
738:
733:
728:
723:
718:
713:
706:
703:
663:
660:
650:
649:
638:
604:loop equations
593:
592:
580:
577:
572:
568:
564:
561:
556:
553:
550:
546:
542:
539:
536:
531:
527:
523:
520:
515:
511:
507:
504:
499:
495:
491:
488:
483:
479:
475:
472:
469:
466:
463:
428:
425:
417:
416:
403:
399:
393:
388:
385:
382:
378:
374:
371:
368:
365:
362:
359:
356:
353:
350:
347:
344:
339:
335:
331:
328:
325:
320:
315:
312:
309:
305:
301:
298:
295:
292:
289:
277:, is given by
263:
242:and therefore
160:
157:
15:
13:
10:
9:
6:
4:
3:
2:
973:
962:
959:
957:
954:
952:
949:
947:
944:
942:
939:
937:
934:
932:
929:
927:
924:
923:
921:
908:
905:Hunt, K. H.,
902:
899:
893:
890:
886:
880:
877:
873:
867:
865:
861:
857:
851:
848:
844:
838:
836:
832:
828:
822:
819:
815:
809:
806:
802:
801:
794:
792:
790:
786:
782:
781:
776:
771:
768:
761:
757:
754:
752:
749:
747:
744:
742:
739:
737:
734:
732:
729:
727:
724:
722:
719:
717:
714:
712:
709:
708:
704:
702:
699:
697:
693:
689:
685:
681:
679:
675:
670:
669:
661:
659:
655:
654:
647:
643:
639:
636:
632:
628:
624:
620:
619:
618:
616:
612:
607:
605:
600:
598:
578:
570:
566:
554:
551:
548:
544:
537:
529:
525:
513:
509:
497:
493:
481:
477:
470:
464:
454:
453:
452:
445:
440:
438:
434:
426:
424:
401:
397:
391:
386:
383:
380:
376:
372:
366:
363:
360:
357:
354:
348:
345:
337:
333:
329:
326:
318:
313:
310:
307:
303:
299:
296:
293:
290:
287:
280:
279:
278:
275:
271:
250:
246:
239:
234:
230:
225:
221:
206:
202:
198:
191:
187:
180:
170:
166:
158:
156:
154:
150:
146:
141:
139:
135:
131:
130:higher pairs.
127:
123:
119:
115:
111:
106:
104:
100:
96:
92:
88:
84:
81:connected by
80:
76:
72:
63:
56:
51:
44:
41:
36:
29:
26:
21:
906:
901:
892:
884:
879:
871:
855:
850:
842:
821:
808:
799:
779:
775:Reuleaux, F.
770:
700:
691:
682:
671:
667:
665:
656:
652:
651:
608:
603:
601:
594:
441:
430:
419:Recall that
418:
273:
269:
251:
244:
237:
223:
219:
207:
200:
196:
189:
185:
178:
168:
162:
142:
129:
117:
107:
79:rigid bodies
74:
68:
28:mobile robot
711:Assur group
653:Explanation
642:geometrical
272:= 1, 2, …,
247:= 6 − 1 = 5
118:lower pairs
103:manipulator
920:Categories
762:References
153:tensegrity
698:systems.
552:−
538:⋯
377:∑
364:−
358:−
330:−
304:∑
300:−
169:mobility,
155:systems.
128:, called
99:kinematic
956:Diagrams
705:See also
688:linkages
623:topology
217:, where
194:, where
114:robotics
43:Robonaut
777:, 1876
611:forward
126:gearing
646:joints
233:slider
222:= 6 −
89:for a
83:joints
829:, SME
635:graph
229:hinge
167:, or
136:. A
95:chain
640:Its
631:tree
629:, a
621:Its
613:and
192:− 1)
188:= 6(
163:The
147:and
124:and
122:cams
73:, a
23:The
240:= 1
231:or
203:+ 1
69:In
40:JSC
25:JPL
922::
863:^
834:^
788:^
680:.
606:.
439:.
267:,
249:.
199:=
105:.
637:.
579:,
576:]
571:n
567:Z
563:[
560:]
555:1
549:n
545:X
541:[
535:]
530:2
526:X
522:[
519:]
514:2
510:Z
506:[
503:]
498:1
494:X
490:[
487:]
482:1
478:Z
474:[
471:=
468:]
465:T
462:[
449:n
421:N
402:i
398:f
392:j
387:1
384:=
381:i
373:+
370:)
367:j
361:1
355:N
352:(
349:6
346:=
343:)
338:i
334:f
327:6
324:(
319:j
314:1
311:=
308:i
297:n
294:6
291:=
288:M
274:j
270:i
264:i
262:f
258:j
254:n
245:c
238:f
224:f
220:c
215:f
211:c
201:n
197:N
190:N
186:M
179:n
177:6
173:n
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.