43:
1669:
100:
601:
171:
1238:
Rotate the coordinate system in the image plane 180° (in either direction). This is the way any practical implementation of a pinhole camera would solve the problem; for a photographic camera we rotate the image before looking at it, and for a digital camera we read out the pixels in such an order
153:
Some of the effects that the pinhole camera model does not take into account can be compensated, for example by applying suitable coordinate transformations on the image coordinates; other effects are sufficiently small to be neglected if a high quality camera is used. This means that the pinhole
138:
or blurring of unfocused objects caused by lenses and finite sized apertures. It also does not take into account that most practical cameras have only discrete image coordinates. This means that the pinhole camera model can only be used as a first order approximation of the mapping from a
1229:
followed by a 180° rotation in the image plane. This corresponds to how a real pinhole camera operates; the resulting image is rotated 180° and the relative size of projected objects depends on their distance to the focal point and the overall size of the image depends on the distance
1099:
1376:
1481:
910:
775:
973:
838:
984:
1264:
597:. This can be done with the help of the following figure which shows the same scene as the previous figure but now from above, looking down in the negative direction of the X2 axis.
1161:
591:
472:
aperture of the camera, through which all projection lines must pass, is assumed to be infinitely small, a point. In the literature this point in 3D space is referred to as the
348:
1211:
528:
462:
1608:
1582:
1506:
1442:
1416:
208:
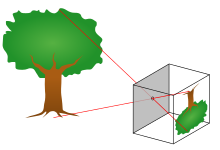
is located. The three axes of the coordinate system are referred to as X1, X2, X3. Axis X3 is pointing in the viewing direction of the camera and is referred to as the
1532:
1556:
1879:
648:
706:
679:
405:
1588:; two camera matrices are equivalent if they are equal up to a scalar multiplication. This description of the pinhole camera mapping, as a linear transformation
261:
of the pinhole camera. A practical implementation of a pinhole camera implies that the image plane is located such that it intersects the X3 axis at coordinate
247:
150:. Its validity depends on the quality of the camera and, in general, decreases from the center of the image to the edges as lens distortion effects increase.
229:
An image plane, where the 3D world is projected through the aperture of the camera. The image plane is parallel to axes X1 and X2 and is located at distance
1234:
between the image plane and the focal point. In order to produce an unrotated image, which is what we expect from a camera, there are two possibilities:
1562:. This implies that the left and right hand sides are equal up to a non-zero scalar multiplication. A consequence of this relation is that also
1258:
In both cases, the resulting mapping from 3D coordinates to 2D image coordinates is given by the expression above, but without the negation, thus
1610:
instead of as a fraction of two linear expressions, makes it possible to simplify many derivations of relations between 3D and 2D coordinates.
380:. This point is given by the intersection of the projection line (green) and the image plane. In any practical situation we can assume that
1686:
1998:
1941:
186:
coordinate system in the figure is left-handed, that is the direction of the OZ axis is in reverse to the system the reader may be used to.
64:
134:, where the camera aperture is described as a point and no lenses are used to focus light. The model does not include, for example,
1951:
1930:
1908:
1889:
1868:
1752:
86:
1733:
1444:
be a representation of the image of this point in the pinhole camera (a 3-dimensional vector). Then the following relation holds
1705:
1450:
849:
714:
1972:
1785:
1690:
1254:
which cannot be implemented in practice, but provides a theoretical camera which may be simpler to analyse than the real one.
1712:
1834:
194:
related to the mapping of a pinhole camera is illustrated in the figure. The figure contains the following basic objects:
1094:{\displaystyle {\begin{pmatrix}y_{1}\\y_{2}\end{pmatrix}}=-{\frac {f}{x_{3}}}{\begin{pmatrix}x_{1}\\x_{2}\end{pmatrix}}}
1371:{\displaystyle {\begin{pmatrix}y_{1}\\y_{2}\end{pmatrix}}={\frac {f}{x_{3}}}{\begin{pmatrix}x_{1}\\x_{2}\end{pmatrix}}}
1719:
915:
780:
57:
51:
1679:
1701:
68:
154:
camera model often can be used as a reasonable description of how a camera depicts a 3D scene, for example in
1809:
1419:
1393:
120:
1226:
1107:
537:
294:
1624:
1392:
The mapping from 3D coordinates of points in space to 2D image coordinates can also be represented in
1619:
1170:
487:
421:
144:
135:
1726:
1591:
1565:
1489:
1425:
1399:
414:
and with axes Y1 and Y2 which are parallel to X1 and X2, respectively. The coordinates of point
1511:
276:
at the intersection of the optical axis and the image plane. This point is referred to as the
1968:
1947:
1926:
1904:
1885:
1864:
1781:
609:
159:
31:
17:
1540:
2003:
1652:
1585:
1559:
623:
684:
657:
383:
155:
1638:, the equivalent location of the pinhole in relation to the image plane in a real camera.
1646:
1641:
1629:
232:
131:
104:
1632:, the equivalent location of the pinhole in relation to object space in a real camera.
1992:
1918:
1534:
1387:
124:
222:. The plane which is spanned by axes X1 and X2 is the front side of the camera, or
1649:, the practical implementation of the mathematical model described in this article.
258:
210:
1668:
843:
A similar investigation, looking in the negative direction of the X1 axis gives
1635:
1104:
which is an expression that describes the relation between the 3D coordinates
613:
116:
99:
1225:
The mapping from 3D to 2D coordinates described by a pinhole camera is a
617:
203:
191:
140:
410:
There is also a 2D coordinate system in the image plane, with origin at
27:
Model of 3D points projected onto planar image via a lens-less aperture
600:
361:
into the camera. This is the green line which passes through point
170:
1901:
Practical
Handbook on Image Processing for Scientific Applications
599:
169:
147:
98:
407:> 0 which means that the intersection point is well defined.
1662:
36:
1962:
1775:
1250:
and rework the previous calculations. This would generate a
612:, both having parts of the projection line (green) as their
1476:{\displaystyle \mathbf {y} \sim \mathbf {C} \,\mathbf {x} }
1242:
Place the image plane so that it intersects the X3 axis at
1943:
Epipolar geometry in Stereo, Motion and Object
Recognition
905:{\displaystyle {\frac {-y_{2}}{f}}={\frac {x_{2}}{x_{3}}}}
770:{\displaystyle {\frac {-y_{1}}{f}}={\frac {x_{1}}{x_{3}}}}
604:
The geometry of a pinhole camera as seen from the X2 axis
708:. Since the two triangles are similar it follows that
1333:
1273:
1056:
993:
1594:
1568:
1543:
1514:
1492:
1453:
1428:
1402:
1267:
1173:
1110:
987:
918:
852:
783:
717:
687:
660:
626:
540:
490:
424:
386:
297:
235:
198:
A 3D orthogonal coordinate system with its origin at
115:
describes the mathematical relationship between the
1693:. Unsourced material may be challenged and removed.
1602:
1576:
1550:
1526:
1500:
1475:
1436:
1410:
1370:
1205:
1155:
1093:
967:
904:
832:
769:
700:
673:
642:
585:
522:
456:
399:
342:
241:
968:{\displaystyle y_{2}=-{\frac {f\,x_{2}}{x_{3}}}}
833:{\displaystyle y_{1}=-{\frac {f\,x_{1}}{x_{3}}}}
253:in the negative direction of the X3 axis, where
484:Next we want to understand how the coordinates
1878:Richard Hartley and Andrew Zisserman (2003).
174:The geometry of a pinhole camera. Note: the x
8:
1967:(2 ed.). Springer Nature. p. 925.
1964:Computer Vision: Algorithms and Applications
1777:Computer Vision: Algorithms and Applications
1780:(2 ed.). Springer Nature. p. 74.
654:and the catheti of the right triangle are
1881:Multiple View Geometry in computer vision
1753:Learn how and when to remove this message
1595:
1593:
1569:
1567:
1544:
1542:
1513:
1493:
1491:
1468:
1467:
1462:
1454:
1452:
1429:
1427:
1403:
1401:
1354:
1340:
1328:
1320:
1311:
1294:
1280:
1268:
1266:
1221:Rotated image and the virtual image plane
1194:
1181:
1172:
1144:
1131:
1118:
1109:
1077:
1063:
1051:
1043:
1034:
1014:
1000:
988:
986:
957:
946:
941:
935:
923:
917:
894:
884:
878:
863:
853:
851:
822:
811:
806:
800:
788:
782:
759:
749:
743:
728:
718:
716:
692:
686:
665:
659:
634:
625:
574:
561:
548:
539:
511:
498:
489:
445:
432:
423:
391:
385:
331:
318:
305:
296:
234:
87:Learn how and when to remove this message
1859:David A. Forsyth and Jean Ponce (2003).
50:This article includes a list of general
30:For broader coverage of this topic, see
1835:"Elements of Geometric Computer Vision"
1766:
418:relative to this coordinate system is
1418:be a representation of a 3D point in
291:somewhere in the world at coordinate
7:
1691:adding citations to reliable sources
350:relative to the axes X1, X2, and X3.
1940:Gang Xu and Zhengyou Zhang (1996).
1558:means equality between elements of
1156:{\displaystyle (x_{1},x_{2},x_{3})}
586:{\displaystyle (x_{1},x_{2},x_{3})}
343:{\displaystyle (x_{1},x_{2},x_{3})}
1861:Computer Vision, A Modern Approach
1422:(a 4-dimensional vector), and let
474:optical (or lens or camera) center
56:it lacks sufficient corresponding
25:
1667:
1596:
1570:
1494:
1469:
1463:
1455:
1430:
1404:
41:
1921:and George C. Stockman (2001).
1678:needs additional citations for
1584:can be seen as an element of a
1946:. Kluwer Academic Publishers.
1884:. Cambridge University Press.
1833:Andrea Fusiello (2005-12-27).
1252:virtual (or front) image plane
1200:
1174:
1150:
1111:
580:
541:
517:
491:
451:
425:
376:onto the image plane, denoted
337:
298:
18:Pinhole camera principal point
1:
1206:{\displaystyle (y_{1},y_{2})}
523:{\displaystyle (y_{1},y_{2})}
457:{\displaystyle (y_{1},y_{2})}
1603:{\displaystyle \mathbf {C} }
1577:{\displaystyle \mathbf {C} }
1501:{\displaystyle \mathbf {C} }
1437:{\displaystyle \mathbf {y} }
1411:{\displaystyle \mathbf {x} }
1999:Geometry in computer vision
1808:Carlo Tomasi (2016-08-09).
127:onto the image plane of an
2020:
1961:Szeliski, Richard (2022).
1774:Szeliski, Richard (2022).
1385:
1382:In homogeneous coordinates
1167:and its image coordinates
978:This can be summarized as
608:In this figure we see two
534:depend on the coordinates
202:. This is also where the
29:
1527:{\displaystyle 3\times 4}
620:of the left triangle are
1837:. Homepages.inf.ed.ac.uk
1239:that it becomes rotated.
372:The projection of point
1810:"A Simple Camera Model"
1551:{\displaystyle \,\sim }
1420:homogeneous coordinates
1394:homogeneous coordinates
121:three-dimensional space
71:more precise citations.
1702:"Pinhole camera model"
1604:
1578:
1552:
1528:
1502:
1477:
1438:
1412:
1372:
1227:perspective projection
1207:
1157:
1095:
969:
906:
834:
771:
702:
675:
644:
643:{\displaystyle -y_{1}}
605:
587:
524:
458:
401:
344:
243:
187:
108:
1625:Collinearity equation
1605:
1579:
1553:
1529:
1503:
1478:
1439:
1413:
1373:
1208:
1158:
1096:
970:
907:
835:
772:
703:
701:{\displaystyle x_{3}}
676:
674:{\displaystyle x_{1}}
645:
603:
588:
525:
459:
402:
400:{\displaystyle x_{3}}
345:
244:
173:
136:geometric distortions
102:
1899:Bernd Jähne (1997).
1687:improve this article
1592:
1566:
1541:
1512:
1490:
1451:
1426:
1400:
1265:
1217:in the image plane.
1171:
1108:
985:
916:
850:
781:
715:
685:
658:
624:
538:
488:
422:
384:
295:
233:
113:pinhole camera model
1620:Camera resectioning
1600:
1574:
1548:
1524:
1498:
1473:
1434:
1408:
1368:
1362:
1302:
1203:
1153:
1091:
1085:
1022:
965:
902:
830:
767:
698:
671:
640:
606:
583:
520:
454:
397:
340:
239:
188:
109:
1925:. Prentice Hall.
1863:. Prentice Hall.
1763:
1762:
1755:
1737:
1560:projective spaces
1326:
1049:
963:
900:
873:
828:
765:
738:
610:similar triangles
242:{\displaystyle f}
160:computer graphics
97:
96:
89:
32:Epipolar geometry
16:(Redirected from
2011:
1985:
1983:
1981:
1957:
1936:
1919:Linda G. Shapiro
1914:
1895:
1874:
1846:
1845:
1843:
1842:
1830:
1824:
1823:
1821:
1820:
1814:
1805:
1799:
1798:
1796:
1794:
1771:
1758:
1751:
1747:
1744:
1738:
1736:
1695:
1671:
1663:
1653:Rectilinear lens
1609:
1607:
1606:
1601:
1599:
1586:projective space
1583:
1581:
1580:
1575:
1573:
1557:
1555:
1554:
1549:
1533:
1531:
1530:
1525:
1507:
1505:
1504:
1499:
1497:
1482:
1480:
1479:
1474:
1472:
1466:
1458:
1443:
1441:
1440:
1435:
1433:
1417:
1415:
1414:
1409:
1407:
1377:
1375:
1374:
1369:
1367:
1366:
1359:
1358:
1345:
1344:
1327:
1325:
1324:
1312:
1307:
1306:
1299:
1298:
1285:
1284:
1212:
1210:
1209:
1204:
1199:
1198:
1186:
1185:
1162:
1160:
1159:
1154:
1149:
1148:
1136:
1135:
1123:
1122:
1100:
1098:
1097:
1092:
1090:
1089:
1082:
1081:
1068:
1067:
1050:
1048:
1047:
1035:
1027:
1026:
1019:
1018:
1005:
1004:
974:
972:
971:
966:
964:
962:
961:
952:
951:
950:
936:
928:
927:
911:
909:
908:
903:
901:
899:
898:
889:
888:
879:
874:
869:
868:
867:
854:
839:
837:
836:
831:
829:
827:
826:
817:
816:
815:
801:
793:
792:
776:
774:
773:
768:
766:
764:
763:
754:
753:
744:
739:
734:
733:
732:
719:
707:
705:
704:
699:
697:
696:
680:
678:
677:
672:
670:
669:
649:
647:
646:
641:
639:
638:
592:
590:
589:
584:
579:
578:
566:
565:
553:
552:
529:
527:
526:
521:
516:
515:
503:
502:
463:
461:
460:
455:
450:
449:
437:
436:
406:
404:
403:
398:
396:
395:
349:
347:
346:
341:
336:
335:
323:
322:
310:
309:
249:from the origin
248:
246:
245:
240:
92:
85:
81:
78:
72:
67:this article by
58:inline citations
45:
44:
37:
21:
2019:
2018:
2014:
2013:
2012:
2010:
2009:
2008:
1989:
1988:
1979:
1977:
1975:
1960:
1954:
1939:
1933:
1923:Computer Vision
1917:
1911:
1898:
1892:
1877:
1871:
1858:
1855:
1850:
1849:
1840:
1838:
1832:
1831:
1827:
1818:
1816:
1812:
1807:
1806:
1802:
1792:
1790:
1788:
1773:
1772:
1768:
1759:
1748:
1742:
1739:
1696:
1694:
1684:
1672:
1661:
1616:
1590:
1589:
1564:
1563:
1539:
1538:
1510:
1509:
1488:
1487:
1449:
1448:
1424:
1423:
1398:
1397:
1390:
1384:
1361:
1360:
1350:
1347:
1346:
1336:
1329:
1316:
1301:
1300:
1290:
1287:
1286:
1276:
1269:
1263:
1262:
1223:
1213:given by point
1190:
1177:
1169:
1168:
1140:
1127:
1114:
1106:
1105:
1084:
1083:
1073:
1070:
1069:
1059:
1052:
1039:
1021:
1020:
1010:
1007:
1006:
996:
989:
983:
982:
953:
942:
937:
919:
914:
913:
890:
880:
859:
855:
848:
847:
818:
807:
802:
784:
779:
778:
755:
745:
724:
720:
713:
712:
688:
683:
682:
661:
656:
655:
630:
622:
621:
570:
557:
544:
536:
535:
507:
494:
486:
485:
482:
441:
428:
420:
419:
387:
382:
381:
355:projection line
327:
314:
301:
293:
292:
278:principal point
231:
230:
224:principal plane
205:camera aperture
185:
181:
177:
168:
156:computer vision
103:A diagram of a
93:
82:
76:
73:
63:Please help to
62:
46:
42:
35:
28:
23:
22:
15:
12:
11:
5:
2017:
2015:
2007:
2006:
2001:
1991:
1990:
1987:
1986:
1973:
1958:
1952:
1937:
1931:
1915:
1909:
1896:
1890:
1875:
1869:
1854:
1851:
1848:
1847:
1825:
1800:
1786:
1765:
1764:
1761:
1760:
1675:
1673:
1666:
1660:
1657:
1656:
1655:
1650:
1647:Pinhole camera
1644:
1642:Ibn al-Haytham
1639:
1633:
1630:Entrance pupil
1627:
1622:
1615:
1612:
1598:
1572:
1547:
1523:
1520:
1517:
1496:
1484:
1483:
1471:
1465:
1461:
1457:
1432:
1406:
1386:Main article:
1383:
1380:
1379:
1378:
1365:
1357:
1353:
1349:
1348:
1343:
1339:
1335:
1334:
1332:
1323:
1319:
1315:
1310:
1305:
1297:
1293:
1289:
1288:
1283:
1279:
1275:
1274:
1272:
1256:
1255:
1246:instead of at
1240:
1222:
1219:
1202:
1197:
1193:
1189:
1184:
1180:
1176:
1152:
1147:
1143:
1139:
1134:
1130:
1126:
1121:
1117:
1113:
1102:
1101:
1088:
1080:
1076:
1072:
1071:
1066:
1062:
1058:
1057:
1055:
1046:
1042:
1038:
1033:
1030:
1025:
1017:
1013:
1009:
1008:
1003:
999:
995:
994:
992:
976:
975:
960:
956:
949:
945:
940:
934:
931:
926:
922:
897:
893:
887:
883:
877:
872:
866:
862:
858:
841:
840:
825:
821:
814:
810:
805:
799:
796:
791:
787:
762:
758:
752:
748:
742:
737:
731:
727:
723:
695:
691:
668:
664:
637:
633:
629:
582:
577:
573:
569:
564:
560:
556:
551:
547:
543:
519:
514:
510:
506:
501:
497:
493:
481:
478:
466:
465:
453:
448:
444:
440:
435:
431:
427:
408:
394:
390:
370:
365:and the point
351:
339:
334:
330:
326:
321:
317:
313:
308:
304:
300:
285:
270:
238:
227:
216:principal axis
183:
179:
175:
167:
164:
132:pinhole camera
119:of a point in
105:pinhole camera
95:
94:
49:
47:
40:
26:
24:
14:
13:
10:
9:
6:
4:
3:
2:
2016:
2005:
2002:
2000:
1997:
1996:
1994:
1976:
1970:
1966:
1965:
1959:
1955:
1953:0-7923-4199-6
1949:
1945:
1944:
1938:
1934:
1932:0-13-030796-3
1928:
1924:
1920:
1916:
1912:
1910:0-8493-8906-2
1906:
1903:. CRC Press.
1902:
1897:
1893:
1891:0-521-54051-8
1887:
1883:
1882:
1876:
1872:
1870:0-12-379777-2
1866:
1862:
1857:
1856:
1852:
1836:
1829:
1826:
1815:. cs.duke.edu
1811:
1804:
1801:
1789:
1783:
1779:
1778:
1770:
1767:
1757:
1754:
1746:
1735:
1732:
1728:
1725:
1721:
1718:
1714:
1711:
1707:
1704: –
1703:
1699:
1698:Find sources:
1692:
1688:
1682:
1681:
1676:This article
1674:
1670:
1665:
1664:
1658:
1654:
1651:
1648:
1645:
1643:
1640:
1637:
1634:
1631:
1628:
1626:
1623:
1621:
1618:
1617:
1613:
1611:
1587:
1561:
1545:
1536:
1535:camera matrix
1521:
1518:
1515:
1459:
1447:
1446:
1445:
1421:
1395:
1389:
1388:Camera matrix
1381:
1363:
1355:
1351:
1341:
1337:
1330:
1321:
1317:
1313:
1308:
1303:
1295:
1291:
1281:
1277:
1270:
1261:
1260:
1259:
1253:
1249:
1245:
1241:
1237:
1236:
1235:
1233:
1228:
1220:
1218:
1216:
1195:
1191:
1187:
1182:
1178:
1166:
1145:
1141:
1137:
1132:
1128:
1124:
1119:
1115:
1086:
1078:
1074:
1064:
1060:
1053:
1044:
1040:
1036:
1031:
1028:
1023:
1015:
1011:
1001:
997:
990:
981:
980:
979:
958:
954:
947:
943:
938:
932:
929:
924:
920:
895:
891:
885:
881:
875:
870:
864:
860:
856:
846:
845:
844:
823:
819:
812:
808:
803:
797:
794:
789:
785:
760:
756:
750:
746:
740:
735:
729:
725:
721:
711:
710:
709:
693:
689:
666:
662:
653:
635:
631:
627:
619:
615:
611:
602:
598:
596:
575:
571:
567:
562:
558:
554:
549:
545:
533:
512:
508:
504:
499:
495:
479:
477:
475:
471:
446:
442:
438:
433:
429:
417:
413:
409:
392:
388:
379:
375:
371:
368:
364:
360:
356:
352:
332:
328:
324:
319:
315:
311:
306:
302:
290:
286:
283:
279:
275:
271:
268:
264:
260:
256:
252:
236:
228:
225:
221:
220:principal ray
217:
213:
212:
207:
206:
201:
197:
196:
195:
193:
172:
165:
163:
161:
157:
151:
149:
146:
142:
137:
133:
130:
126:
122:
118:
114:
106:
101:
91:
88:
80:
77:February 2008
70:
66:
60:
59:
53:
48:
39:
38:
33:
19:
1978:. Retrieved
1963:
1942:
1922:
1900:
1880:
1860:
1853:Bibliography
1839:. Retrieved
1828:
1817:. Retrieved
1803:
1791:. Retrieved
1776:
1769:
1749:
1743:January 2008
1740:
1730:
1723:
1716:
1709:
1697:
1685:Please help
1680:verification
1677:
1485:
1391:
1257:
1251:
1247:
1243:
1231:
1224:
1214:
1164:
1103:
977:
842:
651:
607:
594:
531:
483:
473:
469:
467:
415:
411:
377:
373:
366:
362:
358:
354:
288:
282:image center
281:
277:
273:
266:
262:
259:focal length
254:
250:
223:
219:
215:
211:optical axis
209:
204:
199:
189:
152:
128:
112:
110:
83:
74:
55:
1980:30 December
1793:30 December
614:hypotenuses
480:Formulation
117:coordinates
69:introducing
1993:Categories
1974:3030343723
1841:2013-12-18
1819:2021-02-18
1787:3030343723
1713:newspapers
1659:References
1636:Exit pupil
125:projection
52:references
1546:∼
1519:×
1460:∼
1163:of point
1032:−
933:−
857:−
798:−
722:−
628:−
593:of point
530:of point
357:of point
1614:See also
1537:and the
287:A point
272:A point
267:f > 0
192:geometry
166:Geometry
141:3D scene
123:and its
2004:Cameras
1727:scholar
1508:is the
1396:. Let
618:catheti
616:. The
470:pinhole
257:is the
65:improve
1971:
1950:
1929:
1907:
1888:
1867:
1784:
1729:
1722:
1715:
1708:
1700:
1486:where
265:where
54:, but
1813:(PDF)
1734:JSTOR
1720:books
218:, or
148:image
143:to a
129:ideal
1982:2023
1969:ISBN
1948:ISBN
1927:ISBN
1905:ISBN
1886:ISBN
1865:ISBN
1795:2023
1782:ISBN
1706:news
681:and
650:and
468:The
353:The
190:The
158:and
111:The
1689:by
912:or
777:or
280:or
1995::
1248:-f
476:.
263:-f
214:,
162:.
145:2D
1984:.
1956:.
1935:.
1913:.
1894:.
1873:.
1844:.
1822:.
1797:.
1756:)
1750:(
1745:)
1741:(
1731:·
1724:·
1717:·
1710:·
1683:.
1597:C
1571:C
1522:4
1516:3
1495:C
1470:x
1464:C
1456:y
1431:y
1405:x
1364:)
1356:2
1352:x
1342:1
1338:x
1331:(
1322:3
1318:x
1314:f
1309:=
1304:)
1296:2
1292:y
1282:1
1278:y
1271:(
1244:f
1232:f
1215:Q
1201:)
1196:2
1192:y
1188:,
1183:1
1179:y
1175:(
1165:P
1151:)
1146:3
1142:x
1138:,
1133:2
1129:x
1125:,
1120:1
1116:x
1112:(
1087:)
1079:2
1075:x
1065:1
1061:x
1054:(
1045:3
1041:x
1037:f
1029:=
1024:)
1016:2
1012:y
1002:1
998:y
991:(
959:3
955:x
948:2
944:x
939:f
930:=
925:2
921:y
896:3
892:x
886:2
882:x
876:=
871:f
865:2
861:y
824:3
820:x
813:1
809:x
804:f
795:=
790:1
786:y
761:3
757:x
751:1
747:x
741:=
736:f
730:1
726:y
694:3
690:x
667:1
663:x
652:f
636:1
632:y
595:P
581:)
576:3
572:x
568:,
563:2
559:x
555:,
550:1
546:x
542:(
532:Q
518:)
513:2
509:y
505:,
500:1
496:y
492:(
464:.
452:)
447:2
443:y
439:,
434:1
430:y
426:(
416:Q
412:R
393:3
389:x
378:Q
374:P
369:.
367:O
363:P
359:P
338:)
333:3
329:x
325:,
320:2
316:x
312:,
307:1
303:x
299:(
289:P
284:.
274:R
269:.
255:f
251:O
237:f
226:.
200:O
184:3
182:x
180:2
178:x
176:1
107:.
90:)
84:(
79:)
75:(
61:.
34:.
20:)
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.