20:
28:
56:, center the peg over the hole, and then push the peg along the axis of the hole. If the peg is perfectly aligned and centered, it would then slide into the hole. However, if the peg's alignment or centering is slightly off, the peg contacts one side of the hole first and the peg's tip experiences a lateral force. As the robot's gripper is not perfectly
63:
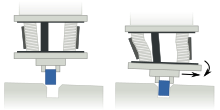
The RCC changes the way the peg responds to a lateral force at its tip. The RCC is typically placed between the robot's wrist and the gripper, though it can be built into the gripper itself. The RCC lets the gripper assembly move in the plane perpendicular to the peg's axis, allowing the peg to
60:, the peg will tend to rotate about an axis in the plane of the gripper's fingers, called the center of compliance. Such a rotation further misaligns the peg, increasing the lateral force and causing more rotation, resulting in a jam that prevents the insertion from being completed.
64:
rotate about an axis in the plane of the top of the hole, effectively moving the center of compliance from the gripper to the hole. With the RCC, the forces generated by any misalignment move the peg in a way that corrects the problem, rather than exacerbates it.
51:
is a mechanical device that facilitates automated assembly by preventing peg-like objects from jamming when they are inserted into a hole with tight clearance. In a naive design without an RCC, a robot might pick up a peg with its
114:
93:
109:
31:
Schematic of an RCC equipped robot: 1. Robot wrist, 2. Attachment ring, 3. RCC, 4. Gripper mechanism, 5. Gripper fingers
79:
53:
19:
103:
27:
85:
57:
36:
16:
Device to facilitate robotic insertion into holes with tight clearance
26:
18:
76:David D. Ardayfio, CRC Press, 1987, p. 120
96:, filed October 13, 1976, issued July 4, 1978
8:
23:Remote center compliance in operation
7:
80:Compensator Remote Center Compliance
14:
90:Remote center compliance system,
94:Charles Stark Draper Laboratory
1:
45:remote center of compliance
131:
74:Fundamentals of Robotics,
115:Mechanisms (engineering)
41:remote center compliance
32:
24:
86:U.S. patent 4,098,001
30:
22:
92:Paul C. Watson, The
110:Industrial robotics
33:
25:
122:
88:
130:
129:
125:
124:
123:
121:
120:
119:
100:
99:
84:
70:
17:
12:
11:
5:
128:
126:
118:
117:
112:
102:
101:
98:
97:
82:
77:
69:
66:
15:
13:
10:
9:
6:
4:
3:
2:
127:
116:
113:
111:
108:
107:
105:
95:
91:
87:
83:
81:
78:
75:
72:
71:
67:
65:
61:
59:
55:
50:
46:
42:
38:
29:
21:
89:
73:
62:
48:
44:
40:
34:
104:Categories
68:References
37:robotics
54:gripper
58:stiff
39:, a
49:RCC
47:or
35:In
106::
43:,
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.