119:) is a device that is controlled remotely by a human operator. In simple cases the controlling operator's command actions correspond directly to actions in the device controlled, as for example in a radio-controlled model aircraft or a tethered deep submergence vehicle. Where communications delays make direct control impractical (such as a remote planetary rover), or it is desired to reduce operator workload (as in a remotely controlled spy or attack aircraft), the device will not be controlled directly, instead being commanded to follow a specified path. At increasing levels of sophistication the device may operate somewhat independently in matters such as obstacle avoidance, also commonly employed in planetary rovers.
33:
88:
1023:
1606:
1618:
210:
318:
reason, the developers have emerged in the new category of desktop telepresence robots that concentrate on this strongest feature to create a much lower cost robot. The desktop telepresence robots, also called "head-and-neck robots" allow users to look around during a meeting and are small enough to be carried from location to location, eliminating the need for remote navigation.
415:
99:", which refers to the subset of telerobotic systems configured with an immersive interface such that the operator feels present in the remote environment, projecting their presence through the remote robot. One of the first telepresence systems that enabled operators to feel present in a remote environment through all of the primary senses (sight, sound, and touch) was the
288:
241:, for example, put a remotely driven rover on the Moon, which was driven in real time (with a 2.5-second lightspeed time delay) by human operators on the ground. Robotic planetary exploration programs use spacecraft that are programmed by humans at ground stations, essentially achieving a long-time-delay form of telerobotic operation. Recent noteworthy examples include the
141:
This only works if the user feels comfortable with the latency of the system, the lag in the response to movements, the visual representation. Any issues such as, inadequate resolution, latency of the video image, lag in the mechanical and computer processing of the movement and response, and optical
295:
The prevalence of high quality video conferencing using mobile devices, tablets and portable computers has enabled a drastic growth in telepresence robots to help give a better sense of remote physical presence for communication and collaboration in the office, home, school, etc. when one cannot be
125:
Two major components of telerobotics and telepresence are the visual and control applications. A remote camera provides a visual representation of the view from the robot. Placing the robotic camera in a perspective that allows intuitive control is a recent technique that although based in
Science
312:
typically contain a display (integrated or separate phone or tablet) mounted on a roaming base. More modern roaming telepresence robots may include an ability to operate autonomously. The robots can map out the space and be able to avoid obstacles while driving themselves between rooms and their
177:
A telerobotic interface can be as simple as a common MMK (monitor-mouse-keyboard) interface. While this is not immersive, it is inexpensive. Telerobotics driven by internet connections are often of this type. A valuable modification to MMK is a joystick, which provides a more intuitive navigation
83:
Teleoperation indicates operation of a machine at a distance. It is similar in meaning to the phrase "remote control" but is usually encountered in research, academic and technical environments. It is most commonly associated with robotics and mobile robots but can be applied to a whole range of
321:
Some telepresence robots are highly helpful for some children with long-term illnesses, who were unable to attend school regularly. Latest innovative technologies can bring people together, and it allows them to stay connected to each other, which significantly help them to overcome loneliness.
278:
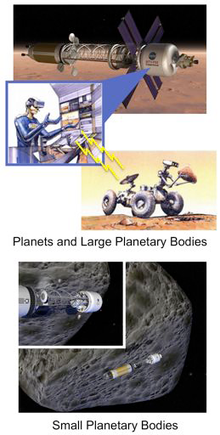
could be done in which the human vehicle brings a crew to Mars, but remains in orbit rather than landing on the surface, while a highly capable remote robot is operated in real time on the surface. Such a system would go beyond the simple long time delay robotics and move to a regime of virtual
317:
Traditional videoconferencing systems and telepresence rooms generally offer pan-tilt-zoom cameras with far end control. The ability for the remote user to turn the device's head and look around naturally during a meeting is often seen as the strongest feature of a telepresence robot. For this
164:
because that reduces the control problems. Recent improvements in computers has shifted the emphasis to more degrees of freedom, allowing robotic devices that seem more intelligent and more human in their motions. This also allows more direct teleoperation as the user can
712:
G.A. Landis, "Teleoperation from Mars Orbit: A Proposal for Human
Exploration", Acta Astronautica, Vol. 61, No. 1, pp 59-65; presented as paper IAC-04-IAA.3.7.2.05, 55th International Astronautical Federation Congress, Vancouver BC, 4–8 October
107:
in the early 1990s. The system enabled operators to perform dexterous tasks (inserting pegs into holes) remotely such that the operator would feel as if he or she was inserting the pegs when in fact it was a robot remotely performing the task.
279:
telepresence on the planet. One study of this concept, the Human
Exploration using Real-time Robotic Operations (HERRO) concept, suggested that such a mission could be used to explore a wide variety of planetary destinations.
905:
149:
Mismatch between the users motions such as registration errors, lag in movement response due to overfiltering, inadequate resolution for small movements, and slow speed can contribute to these problems.
181:
Dedicated telepresence setups utilize a head-mounted display with either single or dual eye display, and an ergonomically matched interface with joystick and related button, slider, trigger controls.
192:
with an immersive display system so that the robot is driven by the person walking or running. Additional modifications may include merged data displays such as
Infrared thermal imaging, real-time
104:
134:") has not been fruitful as the speed, resolution and bandwidth have only recently been adequate to the task of being able to control the robot camera in a meaningful way. Using a
251:
rover. In the case of the MER mission, the spacecraft and the rover operated on stored programs, with the rover drivers on the ground programming each day's operation. The
1012:
366:
system, a surgeon can work inside the body through tiny holes just big enough for the manipulator, with no need to open up the chest cavity to allow hands inside.
374:
306:
typically mount a phone or tablet on a motorized desktop stand to enable the remote person to look around a remote environment by panning and tilting the display.
95:
Teleoperation is the most standard term, used both in research and technical communities, for referring to operation at a distance. This is opposed to "
508:
784:
266:
NASA has proposed use of highly capable telerobotic systems for future planetary exploration using human exploration from orbit. In a concept for
338:
and attach cables to sunken ships to hoist them. They are usually attached by a tether to a control center on a surface ship. The wreck of the
848:
1591:
1351:
814:
1272:
362:
Additionally, a lot of telerobotic research is being done in the field of medical devices, and minimally invasive surgical systems. With a
209:
944:
615:
641:
533:
Rosenberg, L.B. (1992). "The Use of
Virtual Fixtures As Perceptual Overlays to Enhance Operator Performance in Remote Environments".
797:
862:
762:
723:
585:
161:
157:
issues become even more pervasive through the system, and user tension or frustration can make the system difficult to use.
1267:
1654:
1543:
1417:
1361:
252:
1649:
1581:
977:
154:
122:
Devices designed to allow the operator to control a robot at a distance are sometimes called telecheric robotics.
1569:
568:
512:
331:
189:
420:
1218:
1213:
242:
32:
1644:
1412:
937:
696:
454:
1523:
1377:
987:
661:
428:
267:
188:
interfaces and real-time video instead of computer-generated images. Another example would be to use an
377:
maintains a set of test standards used for
Emergency Response and law enforcement telerobotic systems.
1473:
1397:
1162:
1122:
972:
135:
1659:
1622:
1564:
1427:
1127:
967:
901:
840:
560:
334:(ROVs) are widely used to work in water too deep or too dangerous for divers. They repair offshore
143:
131:
146:' that is exacerbated by the lack of vestibular stimulation with visual representation of motion.
138:, the control of the camera can be facilitated by tracking the head as shown in the figure below.
1533:
1508:
1498:
1463:
1407:
1387:
1334:
1307:
1245:
1157:
1091:
992:
915:
459:
385:
271:
213:
NASA HERRO (Human
Exploration using Real-time Robotic Operations) telerobotic exploration concept
127:
64:
296:
there in person. The robot avatar can move or look around at the command of the remote person.
1610:
1574:
1503:
1432:
1319:
1105:
1007:
982:
930:
598:
546:
Rosenberg, L.B. (1993). "Virtual
Fixtures: Perceptual Overlays for Telerobotic Manipulation".
222:
193:
1559:
1437:
1422:
1297:
1289:
1208:
1167:
1152:
1100:
1002:
396:
100:
52:
910:
740:
622:
1468:
1453:
1356:
1346:
1338:
1203:
1076:
1054:
1044:
652:
363:
246:
185:
87:
299:
There have been two primary approaches that both utilize videoconferencing on a display.
815:"Telepresence robots help chronically ill kids maintain social, academic ties at school"
561:"Virtual Fixtures as tools to enhance operator performance in Telepresence Environments"
1586:
1402:
1392:
1314:
1257:
1198:
1137:
1132:
1117:
1049:
1022:
482:
449:
353:
218:
166:
17:
758:
588:." Humanoid Robots, 2004 4th IEEE/RAS International Conference on. Vol. 2. IEEE, 2004.
1638:
1538:
1493:
1177:
1172:
1147:
1142:
535:
Technical Report AL-TR-0089, USAF Armstrong
Laboratory, Wright-Patterson AFB OH, 1992
487:
444:
433:
357:
68:
84:
circumstances in which a device or machine is operated by a person from a distance.
47:
concerned with the control of semi-autonomous robots from a distance, chiefly using
1302:
1277:
1235:
1225:
1086:
997:
475:
469:
335:
226:
142:
distortion due to camera lens and head mounted display lenses, can cause the user '
96:
72:
884:
759:"iRobot's Ava 500 telepresence-on-a-stick is rolling out now (update: $ 69,500!!)"
67:) or tethered connections. It is a combination of two major subfields, which are
1324:
1250:
1240:
1230:
1193:
1110:
1071:
403:
is an example of a project where a robot was operated by users through the Web.
389:
697:
Almost Being There: Why the Future of Space
Exploration Is Not What You Think"
439:
410:
400:
238:
234:
48:
785:
Revolve Robotics Announces Kubi, A Telepresence Rig That Works Like Your Neck
1488:
1382:
1081:
287:
230:
91:
Early Telerobotics (Rosenberg, 1992) US Air Force – Virtual Fixtures system
60:
674:
616:"HERRO Missions to Mars and Venus Using Telerobotic Exploration from Orbit"
586:
Motion capture from inertial sensing for untethered humanoid teleoperation
1528:
1478:
953:
642:"HERRO Missions to Mars Using Telerobotic Surface Exploration from Orbit"
464:
260:
44:
1458:
1039:
340:
572:
1513:
1064:
1059:
601:." IEEE Transactions on Robotics and Automation 15.3 (1999): 400-410.
256:
548:
In Proc. of the IEEE Annual Int. Symposium on Virtual Reality (1993)
1483:
1031:
286:
208:
86:
56:
31:
263:
has been added to the space station for telerobotic experiments.
1518:
599:
Invited review: the synergy between virtual reality and robotics
275:
926:
640:
Oleson, S.R.; Landis, G.A.; McGuire, M.; Schmidt, G.R. (2012).
344:
was explored by an ROV, as well as by a crew-operated vessel.
922:
885:"ASTM Subcommittee E54.09 standards for response robots"
291:
iRobot Ava 500, an autonomous roaming telepresence robot
153:
The same technology can control the robot, but then the
160:
The tendency to build robots has been to minimize the
821:. University of California, Irvine. 9 September 2016
1552:
1446:
1370:
1333:
1288:
1186:
1030:
960:
233:, for example, has been conducted with telerobotic
565:Telemanipulator Technology and Space Telerobotics
911:"The Boss Is Robotic, and Rolling Up Behind You"
703:, 12 November 2012 (accessed 15 November 2012).
865:. NIST Engineering Laboratory. 8 November 2016
255:(ISS) uses a two-armed telemanipulator called
938:
902:Telerobotics and Telepistemology Bibliography
730:, 11 January 2013 (accessed 8 December 2013).
649:Journal of the British Interplanetary Society
370:Emergency Response and law enforcement robots
8:
863:"Standard test methods for response robots"
945:
931:
923:
798:Robotic Telepresence State of the Industry
614:Schmidt, G.R.; Landis, G.A.; Oleson, S.R.
36:Justus security robot patrolling in Kraków
804:, Summer 2013 (accessed 8 December 2013).
796:Sanford Dickert and David Maldow, Esq., "
436:, a military robot built for urban combat
167:control the robot with their own motions
609:
607:
499:
184:Other interfaces merge fully immersive
178:scheme for the planar robot movement.
1352:Simultaneous localization and mapping
507:Corley, Anne-Marie (September 2009).
7:
851:from the original on 4 October 2023.
225:has been conducted with telerobotic
511:. spectrum.ieee.com. Archived from
787:", "Tech Crunch", 6 December 2012.
724:Attack of the Telepresence Robots!
283:Telepresence and videoconferencing
259:. More recently, a humanoid robot
27:Controlling robots from a distance
25:
765:from the original on 14 July 2014
509:"The Reality of Robot Surrogates"
1616:
1605:
1604:
1021:
413:
1617:
105:Air Force Research Laboratories
395:Telerobotics has been used in
1:
904:compiled by Ken Goldberg for
757:Honig, Zach (17 March 2014).
310:Drivable telepresence robots
1362:Vision-guided robot systems
913:article by John Markoff in
841:"Emergency response robots"
664:(accessed 15 November 2012)
304:Desktop telepresence robots
253:International Space Station
1676:
1582:Technological unemployment
351:
332:remotely operated vehicles
217:With the exception of the
1600:
1570:Workplace robotics safety
1019:
274:, a precursor mission to
190:omnidirectional treadmill
584:Miller, Nathan, et al. "
421:Telecommunication portal
196:, or device schematics.
1418:Human–robot interaction
243:Mars exploration rovers
103:system developed at US
18:Remotely operated robot
455:Remote control vehicle
292:
214:
92:
37:
1524:Starship Technologies
429:Astrobotic Technology
290:
212:
155:eye–hand coordination
130:'s 1942 short story "
90:
35:
1474:Energid Technologies
802:Telepresence Options
675:"Robonaut home page"
658:on 17 February 2013.
597:Burdea, Grigore C. "
559:Rosenberg, Louis B.
136:head mounted display
1655:Telepresence robots
1565:Powered exoskeleton
388:are used to handle
386:Remote manipulators
326:Marine applications
229:. Most space-based
1534:Universal Robotics
1509:Intuitive Surgical
1499:Harvest Automation
1464:Barrett Technology
1246:Robotic spacecraft
1092:Audio-Animatronics
916:The New York Times
747:, 28 October 2013.
460:Remote manipulator
381:Other applications
293:
239:Lunokhod-1 mission
215:
162:degrees of freedom
144:simulator sickness
128:Robert A. Heinlein
93:
65:Deep Space Network
38:
1650:Wireless robotics
1632:
1631:
1575:Robotic tech vest
1504:Honeybee Robotics
1320:Electric unicycle
1273:remotely-operated
847:. 28 April 2014.
741:I am a robot boss
573:10.1117/12.164901
313:docking stations.
223:space exploration
194:threat assessment
53:wireless networks
16:(Redirected from
1667:
1620:
1619:
1608:
1607:
1592:Fictional robots
1560:Critique of work
1209:Unmanned vehicle
1025:
947:
940:
933:
924:
919:4 September 2010
889:
888:
881:
875:
874:
872:
870:
859:
853:
852:
837:
831:
830:
828:
826:
811:
805:
794:
788:
781:
775:
774:
772:
770:
754:
748:
737:
731:
722:Rick Lehrbaum, "
720:
714:
710:
704:
693:
687:
686:
684:
682:
671:
665:
659:
657:
651:. Archived from
646:
637:
635:
633:
627:
621:. Archived from
620:
611:
602:
595:
589:
582:
576:
557:
551:
544:
538:
531:
525:
524:
522:
520:
515:on 15 April 2013
504:
423:
418:
417:
416:
397:installation art
268:Mars Exploration
101:Virtual Fixtures
21:
1675:
1674:
1670:
1669:
1668:
1666:
1665:
1664:
1635:
1634:
1633:
1628:
1596:
1548:
1469:Boston Dynamics
1454:Amazon Robotics
1442:
1366:
1357:Visual odometry
1347:Motion planning
1329:
1284:
1204:Continuum robot
1187:Classifications
1182:
1045:Anthropomorphic
1026:
1017:
1013:AI competitions
956:
951:
898:
893:
892:
883:
882:
878:
868:
866:
861:
860:
856:
839:
838:
834:
824:
822:
813:
812:
808:
795:
791:
782:
778:
768:
766:
756:
755:
751:
745:Popular Science
738:
734:
728:InformationWeek
721:
717:
711:
707:
694:
690:
680:
678:
673:
672:
668:
655:
644:
639:
631:
629:
625:
618:
613:
612:
605:
596:
592:
583:
579:
558:
554:
545:
541:
532:
528:
518:
516:
506:
505:
501:
496:
419:
414:
412:
409:
383:
372:
364:robotic surgery
360:
350:
328:
285:
207:
202:
186:virtual reality
175:
113:telemanipulator
81:
43:is the area of
28:
23:
22:
15:
12:
11:
5:
1673:
1671:
1663:
1662:
1657:
1652:
1647:
1637:
1636:
1630:
1629:
1627:
1626:
1614:
1601:
1598:
1597:
1595:
1594:
1589:
1587:Terrainability
1584:
1579:
1578:
1577:
1567:
1562:
1556:
1554:
1550:
1549:
1547:
1546:
1541:
1536:
1531:
1526:
1521:
1516:
1511:
1506:
1501:
1496:
1491:
1486:
1481:
1476:
1471:
1466:
1461:
1456:
1450:
1448:
1444:
1443:
1441:
1440:
1435:
1430:
1425:
1420:
1415:
1410:
1405:
1400:
1395:
1390:
1385:
1380:
1374:
1372:
1368:
1367:
1365:
1364:
1359:
1354:
1349:
1343:
1341:
1331:
1330:
1328:
1327:
1322:
1317:
1312:
1311:
1310:
1300:
1294:
1292:
1286:
1285:
1283:
1282:
1281:
1280:
1275:
1265:
1260:
1255:
1254:
1253:
1243:
1238:
1233:
1228:
1223:
1222:
1221:
1216:
1206:
1201:
1199:Cloud robotics
1196:
1190:
1188:
1184:
1183:
1181:
1180:
1175:
1170:
1165:
1160:
1155:
1150:
1145:
1140:
1135:
1130:
1125:
1120:
1115:
1114:
1113:
1103:
1098:
1097:
1096:
1095:
1094:
1079:
1074:
1069:
1068:
1067:
1062:
1057:
1052:
1042:
1036:
1034:
1028:
1027:
1020:
1018:
1016:
1015:
1010:
1005:
1000:
995:
990:
985:
980:
975:
970:
964:
962:
958:
957:
952:
950:
949:
942:
935:
927:
921:
920:
908:
906:Leonardo/ISAST
897:
896:External links
894:
891:
890:
876:
854:
832:
806:
789:
776:
749:
732:
715:
705:
688:
666:
628:on 13 May 2013
603:
590:
577:
552:
539:
526:
498:
497:
495:
492:
491:
490:
485:
483:Snowplow robot
480:
472:
467:
462:
457:
452:
450:Military robot
447:
442:
437:
431:
425:
424:
408:
405:
382:
379:
371:
368:
354:Remote surgery
349:
346:
327:
324:
315:
314:
307:
284:
281:
245:(MER) and the
237:. The Russian
219:Apollo program
206:
203:
201:
198:
174:
171:
80:
77:
26:
24:
14:
13:
10:
9:
6:
4:
3:
2:
1672:
1661:
1658:
1656:
1653:
1651:
1648:
1646:
1645:Robot control
1643:
1642:
1640:
1625:
1624:
1615:
1613:
1612:
1603:
1602:
1599:
1593:
1590:
1588:
1585:
1583:
1580:
1576:
1573:
1572:
1571:
1568:
1566:
1563:
1561:
1558:
1557:
1555:
1551:
1545:
1542:
1540:
1539:Wolf Robotics
1537:
1535:
1532:
1530:
1527:
1525:
1522:
1520:
1517:
1515:
1512:
1510:
1507:
1505:
1502:
1500:
1497:
1495:
1494:Foster-Miller
1492:
1490:
1487:
1485:
1482:
1480:
1477:
1475:
1472:
1470:
1467:
1465:
1462:
1460:
1457:
1455:
1452:
1451:
1449:
1445:
1439:
1436:
1434:
1431:
1429:
1426:
1424:
1421:
1419:
1416:
1414:
1413:Developmental
1411:
1409:
1406:
1404:
1401:
1399:
1396:
1394:
1391:
1389:
1386:
1384:
1381:
1379:
1376:
1375:
1373:
1369:
1363:
1360:
1358:
1355:
1353:
1350:
1348:
1345:
1344:
1342:
1340:
1336:
1332:
1326:
1323:
1321:
1318:
1316:
1313:
1309:
1306:
1305:
1304:
1301:
1299:
1296:
1295:
1293:
1291:
1287:
1279:
1276:
1274:
1271:
1270:
1269:
1266:
1264:
1261:
1259:
1256:
1252:
1249:
1248:
1247:
1244:
1242:
1239:
1237:
1234:
1232:
1229:
1227:
1224:
1220:
1217:
1215:
1212:
1211:
1210:
1207:
1205:
1202:
1200:
1197:
1195:
1192:
1191:
1189:
1185:
1179:
1178:Soft robotics
1176:
1174:
1173:BEAM robotics
1171:
1169:
1166:
1164:
1161:
1159:
1156:
1154:
1151:
1149:
1146:
1144:
1141:
1139:
1136:
1134:
1131:
1129:
1128:Entertainment
1126:
1124:
1121:
1119:
1116:
1112:
1109:
1108:
1107:
1104:
1102:
1099:
1093:
1090:
1089:
1088:
1085:
1084:
1083:
1080:
1078:
1075:
1073:
1070:
1066:
1063:
1061:
1058:
1056:
1053:
1051:
1048:
1047:
1046:
1043:
1041:
1038:
1037:
1035:
1033:
1029:
1024:
1014:
1011:
1009:
1006:
1004:
1001:
999:
996:
994:
991:
989:
986:
984:
981:
979:
976:
974:
971:
969:
966:
965:
963:
961:Main articles
959:
955:
948:
943:
941:
936:
934:
929:
928:
925:
918:
917:
912:
909:
907:
903:
900:
899:
895:
886:
880:
877:
864:
858:
855:
850:
846:
842:
836:
833:
820:
816:
810:
807:
803:
799:
793:
790:
786:
783:John Biggs, "
780:
777:
764:
760:
753:
750:
746:
742:
739:Jacob Ward, "
736:
733:
729:
725:
719:
716:
709:
706:
702:
698:
692:
689:
676:
670:
667:
663:
654:
650:
643:
624:
617:
610:
608:
604:
600:
594:
591:
587:
581:
578:
574:
570:
566:
562:
556:
553:
550:: pp. 76–82,.
549:
543:
540:
536:
530:
527:
514:
510:
503:
500:
493:
489:
488:UWA Telerobot
486:
484:
481:
478:
477:
473:
471:
468:
466:
463:
461:
458:
456:
453:
451:
448:
446:
445:Medical robot
443:
441:
438:
435:
434:Dragon Runner
432:
430:
427:
426:
422:
411:
406:
404:
402:
398:
393:
391:
387:
380:
378:
376:
369:
367:
365:
359:
358:Medical robot
355:
347:
345:
343:
342:
337:
336:oil platforms
333:
325:
323:
319:
311:
308:
305:
302:
301:
300:
297:
289:
282:
280:
277:
273:
269:
264:
262:
258:
254:
250:
249:
244:
240:
236:
232:
228:
224:
220:
211:
204:
199:
197:
195:
191:
187:
182:
179:
172:
170:
168:
163:
158:
156:
151:
147:
145:
139:
137:
133:
129:
123:
120:
118:
114:
109:
106:
102:
98:
89:
85:
79:Teleoperation
78:
76:
74:
70:
69:teleoperation
66:
62:
58:
54:
50:
46:
42:
34:
30:
19:
1621:
1609:
1378:Evolutionary
1325:Robotic fins
1278:Robotic fish
1263:Telerobotics
1262:
1236:Nanorobotics
1226:Mobile robot
1163:Food service
1158:Agricultural
1008:Competitions
993:Hall of Fame
914:
879:
867:. Retrieved
857:
844:
835:
823:. Retrieved
818:
809:
801:
792:
779:
767:. Retrieved
761:. Engadget.
752:
744:
735:
727:
718:
708:
700:
695:Adam Mann, "
691:
679:. Retrieved
669:
653:the original
648:
638:; see also:
630:. Retrieved
623:the original
593:
580:
564:
555:
547:
542:
534:
529:
517:. Retrieved
513:the original
502:
474:
470:Smart device
394:
384:
373:
361:
348:Telemedicine
339:
329:
320:
316:
309:
303:
298:
294:
270:proposed by
265:
247:
227:space probes
216:
200:Applications
183:
180:
176:
159:
152:
148:
140:
124:
121:
117:teleoperator
116:
112:
110:
97:telepresence
94:
82:
73:telepresence
41:Telerobotics
40:
39:
29:
1398:Open-source
1251:Space probe
1241:Necrobotics
1231:Microbotics
1194:Biorobotics
1123:Educational
1106:Articulated
1087:Animatronic
1072:Claytronics
825:6 September
632:15 November
392:materials.
390:radioactive
1660:Television
1639:Categories
1438:Ubiquitous
1428:Perceptual
1335:Navigation
1290:Locomotion
1268:Underwater
1153:Disability
1101:Industrial
494:References
401:Telegarden
352:See also:
248:Curiosity
235:telescopes
173:Interfaces
49:television
1489:Figure AI
1447:Companies
1423:Paradigms
1408:Adaptable
1388:Simulator
1082:Automaton
1077:Companion
988:Geography
567:. (1993)
231:astronomy
126:Fiction (
61:Bluetooth
1611:Category
1529:Symbotic
1479:FarmWise
1433:Situated
1403:Software
1371:Research
1315:Climbing
1138:Military
1133:Juggling
1118:Domestic
1050:Humanoid
973:Glossary
954:Robotics
849:Archived
763:Archived
519:19 March
465:Robonaut
440:Lunokhod
407:See also
399:pieces;
261:Robonaut
63:and the
45:robotics
1623:Outline
1553:Related
1544:Yaskawa
1459:Anybots
1339:mapping
1308:Hexapod
1303:Walking
1148:Service
1143:Medical
1055:Android
1040:Aerobot
983:History
968:Outline
819:robohub
341:Titanic
330:Marine
221:, most
1514:IRobot
1298:Tracks
1219:ground
1214:aerial
1168:Retail
1065:Gynoid
1060:Cyborg
998:Ethics
869:4 June
769:4 July
681:27 May
677:. Nasa
660:, and
476:Spirit
272:Landis
257:Dextre
55:(like
1484:FANUC
1393:Suite
1258:Swarm
1032:Types
978:Index
713:2004.
701:Wired
662:HERRO
656:(PDF)
645:(PDF)
626:(PDF)
619:(PDF)
479:rover
205:Space
132:Waldo
57:Wi-Fi
1519:KUKA
1383:Kits
1337:and
1003:Laws
871:2020
845:NIST
827:2019
771:2014
683:2011
634:2012
521:2013
375:NIST
356:and
276:Mars
115:(or
71:and
1111:arm
800:",
743:",
726:",
569:doi
1641::
843:.
817:.
699:,
647:.
606:^
563:.
169:.
111:A
75:.
59:,
51:,
946:e
939:t
932:v
887:.
873:.
829:.
773:.
685:.
636:.
575:.
571::
537:.
523:.
20:)
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.