382:(that have no magnetic interaction with the usual rotor and stator) to feed power to the rotor. These transformers have stationary primaries, and rotating secondaries. The secondary is somewhat like a spool wound with magnet wire, the axis of the spool concentric with the rotor's axis. The "spool" is the secondary winding's core, its flanges are the poles, and its coupling does not vary significantly with rotor position. The primary winding is similar, surrounded by its magnetic core, and its end pieces are like thick washers. The holes in those end pieces align with the rotating secondary poles.
742:
351:
be powered by the same branch circuit, so to speak; the mains excitation voltage sources must match in voltage and phase. The safest approach is to bus the five or six lines from transmitters and receivers at a common point. Different makes of selsyns, used in interlock systems, have different output voltages. In all cases, three-phase systems will handle more power and operate a bit more smoothly. The excitation is often 208/240-V 3-phase mains power. Many synchros operate on 30 to 60
99:
79:
397:
depending upon definition) the angle defined by the transmitter. A differential receiver is connected between two transmitters, and shows the sum (or difference, again as defined) between the shaft positions of the two transmitters. There are synchro-like devices called transolvers, somewhat like differential synchros, but with three-lead rotors and four-lead stators.
386:
The latter was called a 36-speed synchro. Of course, the gear trains were made accordingly. At the receiver, the magnitude of the 1X channel's error determined whether the "fast" channel was to be used instead. A small 1X error meant that the 36x channel's data was unambiguous. Once the receiver servo settled, the fine channel normally retained control.
36:
178:. Control type synchros are used in applications that require large torques or high accuracy such as follow-up links and error detectors in servo, automatic control systems (such as an autopilot system). In simpler terms, a control synchro system is a system in which the transmitted signal controls a source of power which does the usable work.
329:
connected properly. One transmitter can turn several receivers; if torque is a factor, the transmitter must be physically larger to source the additional current. In a motion picture interlock system, a large motor-driven distributor can drive as many as 20 machines, sound dubbers, footage counters, and projectors.
404:
is similar to a synchro, but has a stator with four leads, the windings being 90 degrees apart physically instead of 120 degrees. Its rotor might be synchro-like, or have two sets of windings 90 degrees apart. Although a pair of resolvers could theoretically operate like a pair of synchros, resolvers
385:
For high accuracy in gun fire control and aerospace work, so called multi-speed synchro data links were used. For instance, a two-speed link had two transmitters, one rotating for one turn over the full range (such as a gun's bearing), while the other rotated one turn for every 10 degrees of bearing.
170:
In a torque system, a synchro will provide a low-power mechanical output sufficient to position an indicating device, actuate a sensitive switch or move light loads without power amplification. In simpler terms, a torque synchro system is a system in which the transmitted signal does the usable work.
469:
The Panama Canal; An
Engineering Treatise. A Series Of Papers Covering In Full Detail The Technical Problems Involved In The Construction Of The Panama Canal - Geology, Climatology, Municipal Engineering; Dredging, Hydraulics, Power Plants, Etc. Prepared By Engineers And Other Specialists In Charge
350:
Single phase units have five wires: two for an exciter winding (typically line voltage) and three for the output/input. These three are bussed to the other synchros in the system, and provide the power and information to align the shafts of all the receivers. Synchro transmitters and receivers must
362:
A different type of receiver, called a control transformer (CT), is part of a position servo that includes a servo amplifier and servo motor. The motor is geared to the CT rotor, and when the transmitter's rotor moves, the servo motor turns the CT's rotor and the mechanical load to match the new
328:
connect the rotor to external power. A synchro transmitter's shaft is rotated by the mechanism that sends information, while the synchro receiver's shaft rotates a dial, or operates a light mechanical load. Single and three-phase units are common in use, and will follow the other's rotation when
30:
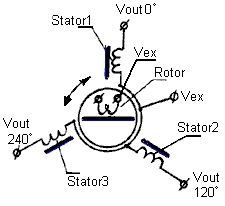
Schematic of a synchro transducer. The complete circle represents the rotor. The solid bars represent the cores of the windings next to them. Power to the rotor is connected by slip rings and brushes, represented by the circles at the ends of the rotor winding. As shown, the rotor induces equal
396:
Differential synchros are another category. They have three-lead rotors and stators like the stator described above, and can be transmitters or receivers. A differential transmitter is connected between a synchro transmitter and a receiver, and its shaft's position adds to (or subtracts from,
181:
Quite often, one system will perform both torque and control functions. Individual units are designed for use in either torque or control systems. Some torque units can be used as control units, but control units cannot replace torque units.
232:
Output: electrical output from rotor (representing an angle equal to the algebraic sum or difference of rotor position angle and angular data from TX) supplied to torque receivers, another TDX, or a torque differential
392:
So called multispeed synchros have stators with many poles, so that their output voltages go through several cycles for one physical revolution. For two-speed systems, these do not require gearing between the shafts.
358:
Synchro transmitters are as described, but 50- and 60-Hz synchro receivers require rotary dampers to keep their shafts from oscillating when not loaded (as with dials) or lightly loaded in high-accuracy applications.
128:
Smaller synchros are still used to remotely drive indicator gauges and as rotary position sensors for aircraft control surfaces, where the reliability of these rugged devices is needed. Digital devices such as the
55:
whose primary-to-secondary coupling may be varied by physically changing the relative orientation of the two windings. Synchros are often used for measuring the angle of a rotating machine such as an
412:) interfaces between resolver and synchro data formats; it was invented to interconnect two-phase AC power with three-phase power, but can also be used for precision applications.
202:
Output: electrical output from stator identifying the rotor position supplied to a torque receiver, torque differential transmitter or a torque differential receiver.
31:
voltages in the 120° and 240° windings, and no voltage in the 0° winding. does not necessarily need to be connected to the common lead of the stator star windings.
560:
59:
platform or transmitting rotation. In its general physical construction, it is much like an electric motor. The primary winding of the transformer, fixed to the
856:
836:
436:
275:
Input: electrical data supplied from two TX's, two TDX's or from one TX and one TDX (one connected to the rotor and one connected to the stator).
609:
117:, and to transmit the desired gun position back to the gun location. Early systems just moved indicator dials, but with the advent of the
704:
553:
293:
Output: electrical output from rotor (proportional to sine of the difference between rotor angular position and electrical input angle).
363:
position. CTs have high-impedance stators and draw much less current than ordinary synchro receivers when not correctly positioned.
27:
994:
876:
726:
546:
366:
Synchro transmitters can also feed synchro to digital converters, which provide a digital representation of the shaft angle.
343:
in most countries), while those for marine or aeronautical use tend to operate at 400 hertz (the frequency of the on-board
159:
Large synchros were used on naval warships, such as destroyers, to operate the steering gear from the wheel on the bridge.
785:
654:
790:
674:
619:
614:
470:
Of The
Various Branches Of The Work And Presented At The International Engineering Congress, San Francisco, California
763:
741:
68:
768:
217:
Output: electrical output same as TX but supplied to a control transformer or control differential transmitter.
71:
causes voltages to appear between the Y-connected secondary windings fixed at 120 degrees to each other on the
20:
866:
773:
719:
229:
Input: TX output applied to stator; rotor positioned according to amount data from TX that must be modified.
320:
On a practical level, synchros resemble motors, in that there is a rotor, stator, and a shaft. Ordinarily,
95:
in the early 1900s to transmit lock gate and valve stem positions, and water levels, to the control desks.
841:
807:
714:
174:
In a control system, a synchro will provide a voltage for conversion to torque through an amplifier and a
824:
802:
780:
669:
659:
431:
401:
56:
999:
594:
344:
953:
871:
861:
817:
812:
797:
629:
409:
290:
Input: electrical data from CX or CDX applied to stator. Rotor positioned mechanically or manually.
149:
106:
64:
963:
881:
851:
846:
829:
684:
664:
634:
379:
75:. The voltages are measured and used to determine the angle of the rotor relative to the stator.
750:
649:
337:
278:
Output: rotor assumes position equal to the algebraic sum or difference of two angular inputs.
948:
325:
153:
60:
758:
709:
689:
679:
483:
145:
114:
467:
917:
912:
902:
624:
604:
589:
524:
441:
426:
137:
130:
122:
199:
Input: rotor positioned mechanically or manually by the information to be transmitted.
113:
used synchros extensively, to transmit angular information from guns and sights to an
988:
927:
303:
designed as a torque receiver, but may be used as either a transmitter or receiver.
731:
141:
110:
98:
92:
897:
699:
639:
569:
52:
78:
922:
907:
599:
446:
248:
Output: same as TDX but supplied to only a control transformer or another CDX.
175:
125:, the fire control system could directly control the positions of heavy guns.
511:", 25 March 1991, Department of the Navy, Washington D.C., Table 1, Page 82.]
421:
389:
For very critical applications, three-speed synchro systems have been used.
340:
321:
167:
There are two types of synchro systems: torque systems and control systems.
118:
484:"Naval Ordnance and Gunnery, Volume 1", 1957, U.S. Navy Manual, Chapter 10.
958:
644:
260:
Input: Electrical angle position data from TX or TDX supplied to stator.
968:
263:
Output: Rotor assumes position determined by electrical input supplied.
498:", 25 March 1991, Department of the Navy, Washington D.C., Pages 1-2.]
538:
171:
In such a system, accuracy on the order of one degree is attainable.
72:
332:
Synchros designed for terrestrial use tend to be driven at 50 or 60
35:
26:
584:
333:
97:
77:
34:
25:
408:
A special T-connected transformer arrangement invented by Scott (
973:
542:
943:
190:
A synchro will fall into one of eight functional categories:
91:
Synchro systems were first used in the control system of the
19:
This article is about the transformer. For other uses, see
309:
Output: depending on the application, same as TX or TR.
102:
View of the connection diagram of a synchro transmitter
133:have replaced synchros in most other applications.
936:
890:
749:
577:
121:, as well as motor-driven high-powered hydraulic
306:Input: depending on the application, same as TX.
554:
16:Variable transformers used in control systems
8:
245:Input: same as TDX but data supplied by CX.
51:and by other brand names) is, in effect, a
561:
547:
539:
534:. Beckenham: Muirhead Vactric Components.
857:Rotary variable differential transformer
837:Linear variable differential transformer
458:
530:Upson, A.R.; Batchelor, J.H. (1978) .
240:Control differential transmitter (CDX)
224:Torque differential transmitter (TDX)
7:
610:Condition monitoring of transformers
509:Synchros. Description and Operation
496:Synchros. Description and Operation
705:Toroidal inductors and transformers
270:Torque differential receiver (TDR)
136:Selsyn motors were widely used in
82:A picture of a synchro transmitter
14:
300:Torque receiver-transmitter (TRX)
740:
148:equipment, before the advent of
877:Variable-frequency transformer
727:Transformer utilization factor
525:AC instrumentation transducers
1:
186:Synchro functional categories
786:Energy efficient transformer
532:Synchro Engineering Handbook
115:analog fire control computer
791:Amorphous metal transformer
675:Resonant inductive coupling
615:Electrical insulation paper
466:Goethals, George W (1916).
1018:
405:are used for computation.
39:Simple two-synchro system.
18:
738:
140:equipment to synchronize
109:designs developed during
69:electromagnetic induction
769:Distribution transformer
473:. New York: McGraw Hill.
347:driven by the engines).
285:Control transformer (CT)
209:Control transmitter (CX)
21:Synchro (disambiguation)
867:Solid-state transformer
774:Pad-mounted transformer
720:Transformer oil testing
194:Torque transmitter (TX)
842:Parametric transformer
808:Instrument transformer
764:Buck–boost transformer
715:Dissolved gas analysis
103:
83:
40:
32:
995:Electric transformers
825:Isolation transformer
803:Grounding transformer
781:Delta-wye transformer
660:Pressure relief valve
101:
81:
38:
29:
345:electrical generator
255:Torque receiver (TR)
163:Synchro system types
954:Mitsubishi Electric
872:Trigger transformer
862:Scott-T transformer
818:Voltage transformer
813:Current transformer
798:Flyback transformer
630:Induction regulator
380:rotary transformers
150:crystal oscillators
107:Fire-control system
65:alternating current
63:, is excited by an
964:Schneider Electric
882:Zigzag transformer
852:Rotary transformer
847:Planar transformer
830:Austin transformer
685:Short-circuit test
665:Quadrature booster
635:Leakage inductance
376:brushless synchros
214:Input: same as TX.
104:
84:
41:
33:
982:
981:
650:Open-circuit test
1007:
949:General Electric
744:
563:
556:
549:
540:
535:
512:
507:"MIL-HDBK-225A,
505:
499:
494:"MIL-HDBK-225A,
492:
486:
481:
475:
474:
463:
370:Synchro variants
354:
154:microelectronics
1017:
1016:
1010:
1009:
1008:
1006:
1005:
1004:
985:
984:
983:
978:
932:
886:
759:Autotransformer
745:
736:
710:Transformer oil
690:Stacking factor
680:Severity factor
573:
567:
529:
521:
516:
515:
506:
502:
493:
489:
482:
478:
465:
464:
460:
455:
418:
372:
352:
318:
188:
165:
146:sound recording
89:
47:(also known as
24:
17:
12:
11:
5:
1015:
1014:
1011:
1003:
1002:
997:
987:
986:
980:
979:
977:
976:
971:
966:
961:
956:
951:
946:
940:
938:
934:
933:
931:
930:
925:
920:
918:Repeating coil
915:
913:Polyphase coil
910:
905:
903:Induction coil
900:
894:
892:
888:
887:
885:
884:
879:
874:
869:
864:
859:
854:
849:
844:
839:
834:
833:
832:
822:
821:
820:
815:
805:
800:
795:
794:
793:
783:
778:
777:
776:
766:
761:
755:
753:
747:
746:
739:
737:
735:
734:
729:
724:
723:
722:
717:
707:
702:
697:
692:
687:
682:
677:
672:
667:
662:
657:
652:
647:
642:
637:
632:
627:
625:High-leg delta
622:
617:
612:
607:
605:Circle diagram
602:
597:
592:
590:Buchholz relay
587:
581:
579:
575:
574:
568:
566:
565:
558:
551:
543:
537:
536:
527:
520:
517:
514:
513:
500:
487:
476:
457:
456:
454:
451:
450:
449:
444:
442:Servomechanism
439:
434:
429:
427:Rotary encoder
424:
417:
414:
371:
368:
317:
314:
313:
312:
311:
310:
307:
301:
297:
296:
295:
294:
291:
286:
282:
281:
280:
279:
276:
271:
267:
266:
265:
264:
261:
256:
252:
251:
250:
249:
246:
241:
237:
236:
235:
234:
230:
225:
221:
220:
219:
218:
215:
210:
206:
205:
204:
203:
200:
195:
187:
184:
164:
161:
138:motion picture
131:rotary encoder
88:
85:
15:
13:
10:
9:
6:
4:
3:
2:
1013:
1012:
1001:
998:
996:
993:
992:
990:
975:
972:
970:
967:
965:
962:
960:
957:
955:
952:
950:
947:
945:
942:
941:
939:
937:Manufacturers
935:
929:
928:Trembler coil
926:
924:
921:
919:
916:
914:
911:
909:
906:
904:
901:
899:
896:
895:
893:
889:
883:
880:
878:
875:
873:
870:
868:
865:
863:
860:
858:
855:
853:
850:
848:
845:
843:
840:
838:
835:
831:
828:
827:
826:
823:
819:
816:
814:
811:
810:
809:
806:
804:
801:
799:
796:
792:
789:
788:
787:
784:
782:
779:
775:
772:
771:
770:
767:
765:
762:
760:
757:
756:
754:
752:
748:
743:
733:
730:
728:
725:
721:
718:
716:
713:
712:
711:
708:
706:
703:
701:
698:
696:
693:
691:
688:
686:
683:
681:
678:
676:
673:
671:
668:
666:
663:
661:
658:
656:
653:
651:
648:
646:
643:
641:
638:
636:
633:
631:
628:
626:
623:
621:
618:
616:
613:
611:
608:
606:
603:
601:
598:
596:
593:
591:
588:
586:
583:
582:
580:
576:
571:
564:
559:
557:
552:
550:
545:
544:
541:
533:
528:
526:
523:
522:
518:
510:
504:
501:
497:
491:
488:
485:
480:
477:
472:
471:
462:
459:
452:
448:
445:
443:
440:
438:
435:
433:
430:
428:
425:
423:
420:
419:
415:
413:
411:
406:
403:
398:
394:
390:
387:
383:
381:
377:
369:
367:
364:
360:
356:
348:
346:
342:
339:
335:
330:
327:
323:
315:
308:
305:
304:
302:
299:
298:
292:
289:
288:
287:
284:
283:
277:
274:
273:
272:
269:
268:
262:
259:
258:
257:
254:
253:
247:
244:
243:
242:
239:
238:
231:
228:
227:
226:
223:
222:
216:
213:
212:
211:
208:
207:
201:
198:
197:
196:
193:
192:
191:
185:
183:
179:
177:
172:
168:
162:
160:
157:
155:
151:
147:
143:
142:movie cameras
139:
134:
132:
126:
124:
120:
116:
112:
108:
100:
96:
94:
86:
80:
76:
74:
70:
66:
62:
58:
54:
50:
46:
37:
28:
22:
732:Vector group
694:
531:
508:
503:
495:
490:
479:
468:
461:
407:
399:
395:
391:
388:
384:
375:
373:
365:
361:
357:
349:
331:
319:
189:
180:
173:
169:
166:
158:
135:
127:
111:World War II
105:
93:Panama Canal
90:
48:
44:
42:
1000:Transducers
898:Hybrid coil
700:Tap changer
640:Magnet wire
570:Transformer
355:V AC also.
67:, which by
53:transformer
989:Categories
923:Tesla coil
908:Oudin coil
600:Center tap
519:References
447:Servomotor
374:So-called
322:slip rings
176:servomotor
422:Amplidyne
410:"Scott T"
341:frequency
316:Operation
233:receiver.
119:amplidyne
959:ProlecGE
670:Resolver
655:Polarity
645:Metadyne
432:Resolver
416:See also
402:resolver
969:Siemens
695:Synchro
620:Growler
595:Bushing
326:brushes
57:antenna
45:synchro
578:Topics
572:topics
353:
123:servos
73:stator
49:selsyn
891:Coils
751:Types
585:Balun
453:Notes
338:mains
336:(the
334:hertz
61:rotor
974:TBEA
437:RVDT
378:use
324:and
152:and
144:and
87:Uses
944:ABB
991::
400:A
156:.
43:A
562:e
555:t
548:v
23:.
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.