3162:
22:
239:
326:). This method is easily applicable even for systems with delays and other non-rational transfer functions, which may appear difficult to analyze with other methods. Stability is determined by looking at the number of encirclements of the point (−1, 0). The range of gains over which the system will be stable can be determined by looking at crossings of the real axis.
2839:
RHP zeros to "cancel out" RHP poles does not remove the instability, but rather ensures that the system will remain unstable even in the presence of feedback, since the closed-loop roots travel between open-loop poles and zeros in the presence of feedback. In fact, the RHP zero can make the unstable pole unobservable and therefore not stabilizable through feedback.)
4755:
4818:
defined by rational functions, such as systems with delays. It can also handle transfer functions with singularities in the right half-plane, unlike Bode plots. The
Nyquist stability criterion can also be used to find the phase and gain margins of a system, which are important for frequency domain controller design.
2838:
must be equal to the number of open-loop poles in the RHP. Any clockwise encirclements of the critical point by the open-loop frequency response (when judged from low frequency to high frequency) would indicate that the feedback control system would be destabilizing if the loop were closed. (Using
4817:
The
Nyquist stability criterion is a graphical technique that determines the stability of a dynamical system, such as a feedback control system. It is based on the argument principle and the Nyquist plot of the open-loop transfer function of the system. It can be applied to systems that are not
340:
When drawn by hand, a cartoon version of the
Nyquist plot is sometimes used, which shows the linearity of the curve, but where coordinates are distorted to show more detail in regions of interest. When plotted computationally, one needs to be careful to cover all frequencies of interest. This
4348:
4111:
4645:
242:
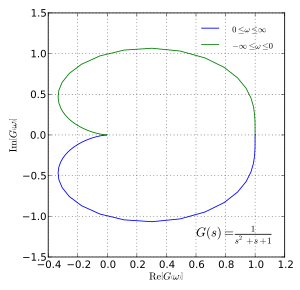
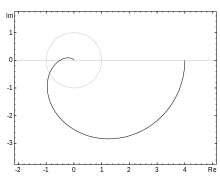
A Nyquist plot. Although the frequencies are not indicated on the curve, it can be inferred that the zero-frequency point is on the right, and the curve spirals toward the origin at high frequency. This is because gain at zero frequency must be purely real (on the
2801:
If the system is originally open-loop unstable, feedback is necessary to stabilize the system. Right-half-plane (RHP) poles represent that instability. For closed-loop stability of a system, the number of closed-loop roots in the right half of the
3508:
3755:
4599:
4457:
4172:
3944:
4750:{\displaystyle {\begin{aligned}Z={}&N+P\\={}&{\text{(number of times the Nyquist plot encircles }}{-1/k}{\text{ clockwise)}}\\&{}+{\text{(number of poles of }}G(s){\text{ in ORHP)}}\end{aligned}}}
4650:
711:
4922:
times clockwise along a semicircle of infinite radius. After applying this rule, the zero poles should be neglected, i.e. if there are no other unstable poles, then the open-loop transfer function
226:
Although
Nyquist is a graphical technique, it only provides a limited amount of intuition for why a system is stable or unstable, or how to modify an unstable system to be stable. Techniques like
5429:
3257:
1507:
1065:
86:
490:
4164:
986:
953:
879:
846:
780:
633:
3322:
3076:
3035:
2705:
329:
The
Nyquist plot can provide some information about the shape of the transfer function. For instance, the plot provides information on the difference between the number of
3811:
1975:
3355:
2571:
2489:
2413:
1830:
1774:
1555:
1359:
1210:
1165:
2994:
2939:
2903:
2033:
2004:
1946:
1917:
1115:
544:
4900:
3936:
5123:
1888:
589:
2743:
1843:
in 1932 uses a less elegant approach. The approach explained here is similar to the approach used by Leroy MacColl (Fundamental theory of servomechanisms 1945) or by
1718:
3131:
2965:
2544:
2344:
2309:
2274:
2177:
2142:
2107:
2072:
917:
5096:
3641:
2836:
2794:
1636:
5050:
5013:
4981:
4949:
4854:
4787:
4637:
4486:
3889:
3840:
3609:
3560:
3384:
3105:
2874:
2669:
2640:
2462:
2373:
2239:
2206:
1803:
1747:
1584:
1449:
1417:
1388:
1292:
1259:
809:
743:
416:
387:
4920:
4874:
4807:
3860:
3580:
3531:
3151:
2762:
2611:
2591:
2509:
2433:
1680:
1660:
1604:
1332:
1312:
1230:
2241:. By counting the resulting contour's encirclements of −1, we find the difference between the number of poles and zeros in the right-half complex plane of
4498:
3396:
3649:
4356:
5413:
5324:
4343:{\displaystyle N=-{\frac {1}{2\pi i}}\oint _{u(\Gamma _{s})}{1 \over u}\,du=-{{1} \over {2\pi i}}\oint _{v(u(\Gamma _{s}))}{1 \over {v+1/k}}\,dv}
5145:
247:-axis) and is commonly non-zero, while most physical processes have some amount of low-pass filtering, so the high-frequency response is zero.
181:
5222:
4106:{\displaystyle N=-{\frac {1}{2\pi i}}\oint _{\Gamma _{s}}{D'(s) \over D(s)}\,ds=-{\frac {1}{2\pi i}}\oint _{u(\Gamma _{s})}{1 \over u}\,du}
2909:
that the contour cannot pass through any pole of the mapping function. The most common case are systems with integrators (poles at zero).
322:
system is done by applying the
Nyquist stability criterion to the Nyquist plot of the open-loop system (i.e. the same system without its
2912:
To be able to analyze systems with poles on the imaginary axis, the
Nyquist Contour can be modified to avoid passing through the point
5570:
5511:
5497:
5483:
5466:
2109:
in the complex plane. By the argument principle, the number of clockwise encirclements of the origin must be the number of zeros of
1836:
encirclements. That is, we consider clockwise encirclements to be positive and counterclockwise encirclements to be negative.
203:(LTI) systems. Nevertheless, there are generalizations of the Nyquist criterion (and plot) for non-linear systems, such as the
4608:. In fact, we find that the above integral corresponds precisely to the number of times the Nyquist plot encircles the point
3176:
Our goal is to, through this process, check for the stability of the transfer function of our unity feedback system with gain
5170:
645:
550:, but this method is somewhat tedious. Conclusions can also be reached by examining the open loop transfer function (OLTF)
5315:
5102:
of the system becomes difficult and the only conclusion that can be drawn from the graph is that there exist zeros on the
419:
295:-axis. The frequency is swept as a parameter, resulting in one point per frequency. The same plot can be described using
4983:
is stable, then the closed-loop system is unstable, if and only if, the
Nyquist plot encircle the point −1 at least once.
5246:"Inventing the 'black box': mathematics as a neglected enabling technology in the history of communications engineering"
4605:
138:
3357:
enclosing the right half plane, with indentations as needed to avoid passing through zeros or poles of the function
5565:
3186:
1454:
994:
192:
5252:
5575:
180:
with right half-plane singularities. In addition, there is a natural generalization to more complex systems with
165:
28:
428:
5550:
3262:
That is, we would like to check whether the characteristic equation of the above transfer function, given by
353:, which transforms integrals and derivatives in the time domain to simple multiplication and division in the
4119:
3161:
2179:
in the right-half complex plane. If instead, the contour is mapped through the open-loop transfer function
208:
955:
is determined by the values of its poles: for stability, the real part of every pole must be negative. If
5410:
5185:
272:
200:
958:
925:
851:
818:
752:
605:
341:
typically means that the parameter is swept logarithmically, in order to cover a wide range of values.
5284:
157:
3268:
3040:
2999:
2674:
164:
of either the closed-loop or open-loop system (although the number of each type of right-half-plane
119:
5180:
307:
of the transfer function is the corresponding angular coordinate. The
Nyquist plot is named after
216:
142:
3763:
1954:
5393:
5367:
5336:
5099:
3387:
3333:
2906:
2549:
2467:
2391:
1808:
1752:
1639:
1512:
1337:
1188:
1176:
1120:
496:
300:
220:
212:
5545:
2970:
2915:
2879:
2009:
1980:
1922:
1893:
1073:
502:
4879:
3897:
5507:
5493:
5479:
5462:
5385:
5218:
5206:
5105:
2847:
The above consideration was conducted with an assumption that the open-loop transfer function
1870:
1848:
553:
350:
334:
319:
312:
296:
280:
264:
177:
169:
2710:
1685:
5377:
5328:
5175:
3110:
2944:
2514:
2314:
2279:
2244:
2147:
2112:
2077:
2042:
1182:
988:
is formed by closing a negative unity feedback loop around the open-loop transfer function,
887:
204:
146:
107:
5529:
EIS Spectrum
Analyser - a freeware program for analysis and simulation of impedance spectra
5069:
3614:
2809:
2767:
1609:
5417:
5214:
5026:
4989:
4957:
4925:
4830:
4763:
4611:
4462:
3865:
3816:
3585:
3536:
3360:
3081:
2850:
2645:
2616:
2438:
2349:
2215:
2182:
1779:
1723:
1560:
1425:
1393:
1364:
1268:
1235:
785:
719:
392:
363:
330:
260:
256:
161:
5533:
5289:
1232:
plane, encompassing but not passing through any number of zeros and poles of a function
267:. The most common use of Nyquist plots is for assessing the stability of a system with
5332:
5135:
4905:
4859:
4792:
3845:
3565:
3516:
3136:
2747:
2596:
2576:
2494:
2418:
1665:
1645:
1589:
1317:
1297:
1215:
599:
288:
276:
103:
199:. While Nyquist is one of the most general stability tests, it is still restricted to
5559:
5523:
5471:
5397:
5340:
5306:
5276:
1840:
1262:
323:
308:
304:
134:
124:
4594:{\displaystyle N=-{\frac {1}{2\pi i}}\oint _{G(\Gamma _{s}))}{\frac {1}{v+1/k}}\,dv}
3503:{\displaystyle -{\frac {1}{2\pi i}}\oint _{\Gamma _{s}}{D'(s) \over D(s)}\,ds=N=Z-P}
1847:(Network analysis and feedback amplifier design 1945), both of whom also worked for
5165:
5160:
5155:
4489:
2209:
1844:
5063:
greater than 0) is exactly the number of unstable poles of the closed-loop system.
3891:
that appear within the contour, that is, within the open right half plane (ORHP).
3750:{\displaystyle Z=-{\frac {1}{2\pi i}}\oint _{\Gamma _{s}}{D'(s) \over D(s)}\,ds+P}
5355:
5150:
2806:-plane must be zero. Hence, the number of counter-clockwise encirclements about
547:
188:
5539:
5528:
4452:{\displaystyle v(u(\Gamma _{s}))={{D(\Gamma _{s})-1} \over {k}}=G(\Gamma _{s})}
5536:
for creating a Nyquist plot of a frequency response of a dynamic system model.
2593:
is the number of poles of the closed loop system in the right half plane, and
636:
227:
21:
5389:
5381:
5245:
3894:
We will now rearrange the above integral via substitution. That is, setting
5140:
592:
173:
3327:
has zeros outside the open left-half-plane (commonly initialized as OLHP).
238:
268:
196:
168:
must be known). As a result, it can be applied to systems defined by non-
4902:. During further analysis it should be assumed that the phasor travels
3330:
We suppose that we have a clockwise (i.e. negatively oriented) contour
130:
5281:
Die elektrische Selbsterregung mit einer Theorie der aktiven Netzwerke
2311:
are the poles of the closed-loop system, and noting that the poles of
2876:
does not have any pole on the imaginary axis (i.e. poles of the form
595:
or, as here, its polar plot using the Nyquist criterion, as follows.
4789:
as defined above corresponds to a stable unity-feedback system when
1851:. This approach appears in most modern textbooks on control theory.
1070:
then the roots of the characteristic equation are also the zeros of
195:, as well as other fields, for designing and analyzing systems with
5372:
16:
Graphical method of determining the stability of a dynamical system
5019:, then for the closed-loop system to be stable, there must be one
3160:
2941:. One way to do it is to construct a semicircular arc with radius
2843:
The Nyquist criterion for systems with poles on the imaginary axis
1863:, a contour that encompasses the right-half of the complex plane:
237:
20:
5310:
230:, while less general, are sometimes a more useful design tool.
1839:
Instead of Cauchy's argument principle, the original paper by
2144:
in the right-half complex plane minus the number of poles of
118:, independently discovered by the German electrical engineer
5354:
Chaffey, Thomas; Forni, Fulvio; Sepulchre, Rodolphe (2023).
5207:"Chapter 4.3. Das Stabilitätskriterium von Strecker-Nyquist"
964:
931:
857:
824:
758:
651:
611:
5296:(NB. Earlier works can be found in the literature section.)
303:
of the transfer function is the radial coordinate, and the
2613:
is the number of poles of the open-loop transfer function
5066:
However, if the graph happens to pass through the point
5542:- free interactive virtual tool, control loop simulator
3153:
is the multiplicity of the pole on the imaginary axis.
706:{\displaystyle {\mathcal {T}}(s)={\frac {N(s)}{D(s)}}.}
337:
by the angle at which the curve approaches the origin.
2642:
in the right half plane, the resultant contour in the
389:; when placed in a closed loop with negative feedback
141:
in 1932, is a graphical technique for determining the
5108:
5072:
5029:
4992:
4960:
4928:
4908:
4882:
4862:
4833:
4795:
4766:
4648:
4614:
4501:
4465:
4359:
4175:
4122:
3947:
3900:
3868:
3848:
3819:
3766:
3652:
3617:
3588:
3568:
3539:
3519:
3399:
3363:
3336:
3271:
3189:
3139:
3113:
3084:
3043:
3002:
2973:
2947:
2918:
2882:
2853:
2812:
2770:
2750:
2713:
2677:
2648:
2619:
2599:
2579:
2552:
2517:
2497:
2470:
2441:
2421:
2394:
2352:
2317:
2282:
2247:
2218:
2185:
2150:
2115:
2080:
2045:
2012:
1983:
1957:
1925:
1896:
1873:
1832:
and that encirclements in the opposite direction are
1811:
1782:
1755:
1726:
1688:
1668:
1648:
1612:
1592:
1563:
1515:
1457:
1428:
1396:
1367:
1340:
1320:
1300:
1271:
1238:
1218:
1191:
1123:
1076:
997:
961:
928:
890:
854:
821:
788:
755:
722:
648:
608:
556:
505:
431:
395:
366:
160:, it can be applied without explicitly computing the
133:
in 1930 and the Swedish-American electrical engineer
31:
5546:Mathematica function for creating the Nyquist plot
5117:
5090:
5044:
5007:
4975:
4943:
4914:
4894:
4868:
4848:
4801:
4781:
4749:
4631:
4593:
4480:
4451:
4342:
4158:
4105:
3930:
3883:
3854:
3834:
3805:
3749:
3635:
3603:
3574:
3554:
3525:
3502:
3378:
3349:
3316:
3251:
3145:
3125:
3099:
3070:
3029:
2988:
2959:
2933:
2897:
2868:
2830:
2788:
2756:
2737:
2699:
2663:
2634:
2605:
2585:
2565:
2538:
2503:
2483:
2456:
2427:
2407:
2367:
2338:
2303:
2268:
2233:
2200:
2171:
2136:
2101:
2066:
2027:
1998:
1969:
1940:
1911:
1882:
1824:
1797:
1768:
1741:
1712:
1674:
1654:
1630:
1598:
1578:
1549:
1501:
1443:
1411:
1382:
1353:
1326:
1306:
1286:
1253:
1224:
1204:
1159:
1109:
1059:
980:
947:
911:
873:
840:
803:
774:
737:
705:
627:
583:
538:
484:
410:
381:
187:The Nyquist stability criterion is widely used in
80:
4685:(number of times the Nyquist plot encircles
2039:The Nyquist contour mapped through the function
360:We consider a system whose transfer function is
5023:-clockwise encirclement of −1 for each pole of
4876:, then the Nyquist plot has a discontinuity at
3078:. Such a modification implies that the phasor
172:, such as systems with delays. In contrast to
4116:We then make a further substitution, setting
3252:{\displaystyle T(s)={\frac {kG(s)}{1+kG(s)}}}
1502:{\displaystyle \Gamma _{F(s)}=F(\Gamma _{s})}
1060:{\displaystyle G(s)H(s)={\frac {A(s)}{B(s)}}}
495:Stability can be determined by examining the
318:Assessment of the stability of a closed-loop
8:
5459:Introduction to the Theory of Linear Systems
4639:clockwise. Thus, we may finally state that
2905:). This results from the requirement of the
223:can also be applied for non-linear systems.
5551:The Nyquist Diagram for Electrical Circuits
3611:by the same contour. Rearranging, we have
3107:travels along an arc of infinite radius by
2573:. Alternatively, and more importantly, if
81:{\displaystyle G(s)={\frac {1}{s^{2}+s+1}}}
4809:, as evaluated above, is equal to 0.
1776:. Note that we count encirclements in the
1682:are, respectively, the number of zeros of
485:{\displaystyle {\frac {G(s)}{1+G(s)H(s)}}}
5371:
5107:
5071:
5028:
4991:
4959:
4927:
4907:
4881:
4861:
4832:
4794:
4765:
4738:
4721:
4716:
4704:
4695:
4688:
4683:
4679:
4659:
4649:
4647:
4621:
4613:
4584:
4573:
4558:
4544:
4533:
4511:
4500:
4464:
4440:
4420:
4404:
4393:
4391:
4376:
4358:
4333:
4322:
4312:
4307:
4293:
4276:
4259:
4254:
4252:
4239:
4229:
4218:
4207:
4185:
4174:
4138:
4121:
4096:
4086:
4075:
4064:
4042:
4029:
3992:
3984:
3979:
3957:
3946:
3899:
3867:
3847:
3818:
3765:
3734:
3697:
3689:
3684:
3662:
3651:
3616:
3587:
3567:
3538:
3518:
3475:
3438:
3430:
3425:
3403:
3398:
3362:
3341:
3335:
3270:
3205:
3188:
3138:
3112:
3083:
3042:
3001:
2972:
2946:
2917:
2881:
2852:
2811:
2769:
2749:
2712:
2682:
2676:
2647:
2618:
2598:
2578:
2557:
2551:
2516:
2496:
2475:
2469:
2440:
2420:
2399:
2393:
2351:
2316:
2281:
2246:
2217:
2184:
2149:
2114:
2079:
2044:
2011:
1982:
1956:
1924:
1895:
1872:
1816:
1810:
1781:
1760:
1754:
1725:
1687:
1667:
1647:
1611:
1591:
1562:
1529:
1522:
1514:
1490:
1462:
1456:
1427:
1395:
1366:
1345:
1339:
1319:
1299:
1270:
1237:
1217:
1196:
1190:
1122:
1075:
1025:
996:
963:
962:
960:
930:
929:
927:
889:
856:
855:
853:
823:
822:
820:
787:
757:
756:
754:
721:
668:
650:
649:
647:
610:
609:
607:
555:
504:
432:
430:
394:
365:
184:, such as control systems for airplanes.
57:
47:
30:
5325:American Telephone and Telegraph Company
5211:Lineare Regelungs- und Steuerungstheorie
4459:gives us the image of our contour under
5430:"12.2: Nyquist Criterion for Stability"
5197:
5052:in the right-half of the complex plane.
1805:plane in the same sense as the contour
499:of the desensitivity factor polynomial
5360:IEEE Transactions on Automatic Control
4492:. We may further reduce the integral
5492:; Silesian University of Technology;
5356:"Graphical Nonlinear System Analysis"
5055:The number of surplus encirclements (
4159:{\displaystyle v(u)={\frac {u-1}{k}}}
2707:shall encircle (clockwise) the point
881:are also said to be the roots of the
635:can be expressed as the ratio of two
7:
182:multiple inputs and multiple outputs
116:Strecker–Nyquist stability criterion
5504:Feedback Control of Dynamic Systems
4986:If the open-loop transfer function
4954:If the open-loop transfer function
4827:If the open-loop transfer function
5524:Applets with modifiable parameters
5333:10.1002/j.1538-7305.1932.tb02344.x
4541:
4437:
4401:
4373:
4290:
4215:
4072:
3981:
3686:
3427:
3338:
2679:
2554:
2472:
2396:
2022:
1993:
1964:
1935:
1906:
1813:
1757:
1487:
1459:
1342:
1193:
1170:
14:
5283:(in German). Stuttgart, Germany:
5146:Routh–Hurwitz stability criterion
3165:A unity negative feedback system
981:{\displaystyle {\mathcal {T}}(s)}
948:{\displaystyle {\mathcal {T}}(s)}
874:{\displaystyle {\mathcal {T}}(s)}
841:{\displaystyle {\mathcal {T}}(s)}
775:{\displaystyle {\mathcal {T}}(s)}
628:{\displaystyle {\mathcal {T}}(s)}
5244:Bissell, Christopher C. (2001).
4856:has a zero pole of multiplicity
1951:a semicircular arc, with radius
1314:. Precisely, each complex point
259:of a frequency response used in
5258:from the original on 2019-06-14
3582:denotes the number of poles of
3533:denotes the number of zeros of
1419:plane yielding a new contour.
5478:; Cambridge University Press;
5171:Barkhausen stability criterion
5098:, then deciding upon even the
5039:
5033:
5002:
4996:
4970:
4964:
4938:
4932:
4843:
4837:
4776:
4770:
4735:
4729:
4553:
4550:
4537:
4475:
4469:
4446:
4433:
4410:
4397:
4385:
4382:
4369:
4363:
4302:
4299:
4286:
4280:
4224:
4211:
4132:
4126:
4081:
4068:
4023:
4017:
4009:
4003:
3925:
3919:
3910:
3904:
3878:
3872:
3829:
3823:
3813:has exactly the same poles as
3800:
3794:
3776:
3770:
3728:
3722:
3714:
3708:
3598:
3592:
3549:
3543:
3469:
3463:
3455:
3449:
3373:
3367:
3317:{\displaystyle D(s)=1+kG(s)=0}
3305:
3299:
3281:
3275:
3243:
3237:
3220:
3214:
3199:
3193:
3094:
3088:
3071:{\displaystyle 0+j(\omega +r)}
3065:
3053:
3030:{\displaystyle 0+j(\omega -r)}
3024:
3012:
2951:
2863:
2857:
2732:
2714:
2700:{\displaystyle \Gamma _{G(s)}}
2692:
2686:
2658:
2652:
2629:
2623:
2533:
2527:
2451:
2445:
2362:
2356:
2333:
2327:
2298:
2292:
2276:. Recalling that the zeros of
2263:
2257:
2228:
2222:
2195:
2189:
2166:
2160:
2131:
2125:
2096:
2090:
2061:
2055:
1961:
1792:
1786:
1736:
1730:
1707:
1701:
1573:
1567:
1496:
1483:
1472:
1466:
1438:
1432:
1406:
1400:
1377:
1371:
1281:
1275:
1248:
1242:
1148:
1142:
1133:
1127:
1104:
1098:
1092:
1086:
1051:
1045:
1037:
1031:
1019:
1013:
1007:
1001:
975:
969:
942:
936:
900:
894:
868:
862:
835:
829:
798:
792:
769:
763:
732:
726:
694:
688:
680:
674:
662:
656:
622:
616:
578:
572:
566:
560:
533:
527:
521:
515:
476:
470:
464:
458:
444:
438:
405:
399:
376:
370:
41:
35:
1:
5316:Bell System Technical Journal
3037:and travels anticlockwise to
420:closed loop transfer function
152:Because it only looks at the
4951:should be considered stable.
3806:{\displaystyle D(s)=1+kG(s)}
3562:enclosed by the contour and
3169:with scalar gain denoted by
1970:{\displaystyle r\to \infty }
3350:{\displaystyle \Gamma _{s}}
2566:{\displaystyle \Gamma _{s}}
2484:{\displaystyle \Gamma _{s}}
2408:{\displaystyle \Gamma _{s}}
1825:{\displaystyle \Gamma _{s}}
1769:{\displaystyle \Gamma _{s}}
1640:Cauchy's argument principle
1550:{\displaystyle s={-1/k+j0}}
1354:{\displaystyle \Gamma _{s}}
1205:{\displaystyle \Gamma _{s}}
1171:Cauchy's argument principle
1160:{\displaystyle A(s)+B(s)=0}
139:Bell Telephone Laboratories
112:Nyquist stability criterion
5594:
5213:(in German) (2 ed.).
2989:{\displaystyle 0+j\omega }
2934:{\displaystyle 0+j\omega }
2898:{\displaystyle 0+j\omega }
2511:be the number of zeros of
2435:be the number of poles of
2028:{\displaystyle 0-j\infty }
2006:and travels clock-wise to
1999:{\displaystyle 0+j\infty }
1941:{\displaystyle 0+j\infty }
1912:{\displaystyle 0-j\infty }
1174:
1110:{\displaystyle 1+G(s)H(s)}
539:{\displaystyle 1+G(s)H(s)}
193:control system engineering
4895:{\displaystyle \omega =0}
4723:(number of poles of
4606:Cauchy's integral formula
3931:{\displaystyle u(s)=D(s)}
3862:by counting the poles of
2346:are same as the poles of
1117:, or simply the roots of
349:The mathematics uses the
5571:Classical control theory
5540:PID Nyquist plot shaping
5476:Response & Stability
5457:Faulkner, E. A. (1969):
5382:10.1109/TAC.2023.3234016
5205:Reinschke, Kurt (2014).
5118:{\displaystyle j\omega }
2388:Given a Nyquist contour
1883:{\displaystyle j\omega }
1867:a path traveling up the
1509:will encircle the point
1361:is mapped to the point
1265:to another plane (named
584:{\displaystyle G(s)H(s)}
3157:Mathematical derivation
2738:{\displaystyle (-1+j0)}
1713:{\displaystyle 1+kF(s)}
1451:, which is the contour
1294:plane) by the function
883:characteristic equation
311:, a former engineer at
5461:; Chapman & Hall;
5434:Mathematics LibreTexts
5119:
5092:
5046:
5009:
4977:
4945:
4916:
4896:
4870:
4850:
4803:
4783:
4751:
4633:
4595:
4488:, which is to say our
4482:
4453:
4344:
4160:
4107:
3932:
3885:
3856:
3836:
3807:
3751:
3637:
3605:
3576:
3556:
3527:
3504:
3380:
3351:
3318:
3253:
3173:
3147:
3127:
3126:{\displaystyle -l\pi }
3101:
3072:
3031:
2990:
2961:
2960:{\displaystyle r\to 0}
2935:
2899:
2870:
2832:
2799:
2790:
2758:
2739:
2701:
2665:
2636:
2607:
2587:
2567:
2540:
2539:{\displaystyle 1+G(s)}
2505:
2485:
2458:
2429:
2409:
2369:
2340:
2339:{\displaystyle 1+G(s)}
2305:
2304:{\displaystyle 1+G(s)}
2270:
2269:{\displaystyle 1+G(s)}
2235:
2202:
2173:
2172:{\displaystyle 1+G(s)}
2138:
2137:{\displaystyle 1+G(s)}
2103:
2102:{\displaystyle 1+G(s)}
2068:
2067:{\displaystyle 1+G(s)}
2029:
2000:
1971:
1942:
1913:
1884:
1826:
1799:
1770:
1743:
1714:
1676:
1656:
1632:
1600:
1580:
1551:
1503:
1445:
1413:
1384:
1355:
1328:
1308:
1288:
1255:
1226:
1206:
1161:
1111:
1061:
982:
949:
913:
912:{\displaystyle D(s)=0}
875:
842:
805:
776:
739:
707:
629:
585:
540:
486:
412:
383:
248:
215:. Additionally, other
99:
82:
5502:Franklin, G. (2002):
5327:(AT&T): 126–147.
5311:"Regeneration Theory"
5186:Hankel singular value
5120:
5093:
5091:{\displaystyle -1+j0}
5047:
5010:
4978:
4946:
4917:
4897:
4871:
4851:
4804:
4784:
4752:
4634:
4596:
4483:
4454:
4345:
4161:
4108:
3933:
3886:
3857:
3842:. Thus, we may find
3837:
3808:
3752:
3638:
3636:{\displaystyle Z=N+P}
3606:
3577:
3557:
3528:
3505:
3381:
3352:
3319:
3254:
3164:
3148:
3128:
3102:
3073:
3032:
2991:
2962:
2936:
2900:
2871:
2833:
2831:{\displaystyle -1+j0}
2791:
2789:{\displaystyle N=Z-P}
2759:
2740:
2702:
2666:
2637:
2608:
2588:
2568:
2541:
2506:
2486:
2459:
2430:
2410:
2385:
2370:
2341:
2306:
2271:
2236:
2203:
2174:
2139:
2104:
2069:
2030:
2001:
1972:
1943:
1914:
1885:
1827:
1800:
1771:
1744:
1715:
1677:
1657:
1633:
1631:{\displaystyle N=P-Z}
1601:
1581:
1552:
1504:
1446:
1414:
1385:
1356:
1329:
1309:
1289:
1256:
1227:
1212:drawn in the complex
1207:
1162:
1112:
1062:
983:
950:
914:
876:
843:
806:
777:
740:
708:
630:
586:
541:
487:
422:(CLTF) then becomes:
413:
384:
273:Cartesian coordinates
241:
209:scaled relative graph
201:linear time-invariant
83:
25:The Nyquist plot for
24:
5490:Control fundamentals
5488:Gessing, R. (2004):
5106:
5070:
5045:{\displaystyle G(s)}
5027:
5008:{\displaystyle G(s)}
4990:
4976:{\displaystyle G(s)}
4958:
4944:{\displaystyle G(s)}
4926:
4906:
4880:
4860:
4849:{\displaystyle G(s)}
4831:
4793:
4782:{\displaystyle T(s)}
4764:
4646:
4632:{\displaystyle -1/k}
4612:
4499:
4481:{\displaystyle G(s)}
4463:
4357:
4173:
4120:
3945:
3898:
3884:{\displaystyle G(s)}
3866:
3846:
3835:{\displaystyle G(s)}
3817:
3764:
3650:
3615:
3604:{\displaystyle D(s)}
3586:
3566:
3555:{\displaystyle D(s)}
3537:
3517:
3397:
3379:{\displaystyle G(s)}
3361:
3334:
3269:
3187:
3180:, which is given by
3137:
3111:
3100:{\displaystyle G(s)}
3082:
3041:
3000:
2971:
2945:
2916:
2880:
2869:{\displaystyle G(s)}
2851:
2810:
2768:
2748:
2711:
2675:
2664:{\displaystyle G(s)}
2646:
2635:{\displaystyle G(s)}
2617:
2597:
2577:
2550:
2515:
2495:
2468:
2457:{\displaystyle G(s)}
2439:
2419:
2392:
2368:{\displaystyle G(s)}
2350:
2315:
2280:
2245:
2234:{\displaystyle G(s)}
2216:
2208:, the result is the
2201:{\displaystyle G(s)}
2183:
2148:
2113:
2078:
2043:
2010:
1981:
1955:
1923:
1894:
1871:
1809:
1798:{\displaystyle F(s)}
1780:
1753:
1742:{\displaystyle F(s)}
1724:
1686:
1666:
1646:
1610:
1590:
1579:{\displaystyle F(s)}
1561:
1513:
1455:
1444:{\displaystyle F(s)}
1426:
1422:The Nyquist plot of
1412:{\displaystyle F(s)}
1394:
1383:{\displaystyle F(s)}
1365:
1338:
1318:
1298:
1287:{\displaystyle F(s)}
1269:
1254:{\displaystyle F(s)}
1236:
1216:
1189:
1121:
1074:
995:
959:
926:
888:
852:
819:
804:{\displaystyle D(s)}
786:
753:
738:{\displaystyle N(s)}
720:
646:
606:
554:
503:
429:
411:{\displaystyle H(s)}
393:
382:{\displaystyle G(s)}
364:
29:
5181:Control engineering
2375:, we now state the
1861:the Nyquist contour
1859:We first construct
1749:inside the contour
782:, and the roots of
5416:2008-09-30 at the
5115:
5100:marginal stability
5088:
5042:
5005:
4973:
4941:
4912:
4892:
4866:
4846:
4799:
4779:
4760:We thus find that
4747:
4745:
4629:
4591:
4478:
4449:
4340:
4156:
4103:
3928:
3881:
3852:
3832:
3803:
3760:We then note that
3747:
3643:, which is to say
3633:
3601:
3572:
3552:
3523:
3500:
3388:argument principle
3376:
3347:
3314:
3249:
3174:
3143:
3123:
3097:
3068:
3027:
2986:
2957:
2931:
2907:argument principle
2895:
2866:
2828:
2786:
2754:
2735:
2697:
2661:
2632:
2603:
2583:
2563:
2536:
2501:
2481:
2454:
2425:
2405:
2365:
2336:
2301:
2266:
2231:
2198:
2169:
2134:
2099:
2064:
2025:
1996:
1967:
1938:
1909:
1880:
1822:
1795:
1766:
1739:
1710:
1672:
1652:
1628:
1596:
1576:
1547:
1499:
1441:
1409:
1380:
1351:
1324:
1304:
1284:
1251:
1222:
1202:
1177:Argument principle
1157:
1107:
1057:
978:
945:
909:
871:
838:
801:
772:
735:
703:
625:
602:transfer function
581:
536:
482:
408:
379:
291:is plotted on the
283:is plotted on the
249:
217:stability criteria
213:nonlinear operator
178:transfer functions
170:rational functions
100:
78:
5566:Signal processing
5506:; Prentice Hall,
5366:(10): 6067–6081.
4915:{\displaystyle l}
4869:{\displaystyle l}
4802:{\displaystyle Z}
4741:
4724:
4707:
4686:
4582:
4527:
4425:
4353:We now note that
4331:
4270:
4237:
4201:
4166:. This gives us
4154:
4094:
4058:
4027:
3973:
3855:{\displaystyle P}
3732:
3678:
3575:{\displaystyle P}
3526:{\displaystyle Z}
3473:
3419:
3247:
3146:{\displaystyle l}
2996:, that starts at
2757:{\displaystyle N}
2606:{\displaystyle P}
2586:{\displaystyle Z}
2504:{\displaystyle Z}
2428:{\displaystyle P}
2379:Nyquist Criterion
2074:yields a plot of
1977:, that starts at
1849:Bell Laboratories
1675:{\displaystyle P}
1655:{\displaystyle Z}
1599:{\displaystyle N}
1327:{\displaystyle s}
1307:{\displaystyle F}
1225:{\displaystyle s}
1055:
922:The stability of
698:
546:, e.g. using the
480:
351:Laplace transform
335:transfer function
320:negative feedback
313:Bell Laboratories
297:polar coordinates
281:transfer function
265:signal processing
261:automatic control
158:open loop systems
76:
5583:
5576:Stability theory
5445:
5444:
5442:
5441:
5426:
5420:
5408:
5402:
5401:
5375:
5351:
5345:
5344:
5309:(January 1932).
5303:
5297:
5295:
5293:
5285:S. Hirzel Verlag
5273:
5267:
5266:
5264:
5263:
5257:
5250:
5241:
5235:
5234:
5232:
5231:
5224:978-3-64240960-8
5202:
5176:Circle criterion
5124:
5122:
5121:
5116:
5097:
5095:
5094:
5089:
5051:
5049:
5048:
5043:
5014:
5012:
5011:
5006:
4982:
4980:
4979:
4974:
4950:
4948:
4947:
4942:
4921:
4919:
4918:
4913:
4901:
4899:
4898:
4893:
4875:
4873:
4872:
4867:
4855:
4853:
4852:
4847:
4808:
4806:
4805:
4800:
4788:
4786:
4785:
4780:
4756:
4754:
4753:
4748:
4746:
4742:
4739:
4725:
4722:
4717:
4712:
4708:
4706: clockwise)
4705:
4703:
4699:
4687:
4684:
4680:
4660:
4638:
4636:
4635:
4630:
4625:
4600:
4598:
4597:
4592:
4583:
4581:
4577:
4559:
4557:
4556:
4549:
4548:
4528:
4526:
4512:
4487:
4485:
4484:
4479:
4458:
4456:
4455:
4450:
4445:
4444:
4426:
4424:
4419:
4409:
4408:
4392:
4381:
4380:
4349:
4347:
4346:
4341:
4332:
4330:
4326:
4308:
4306:
4305:
4298:
4297:
4271:
4269:
4258:
4253:
4238:
4230:
4228:
4227:
4223:
4222:
4202:
4200:
4186:
4165:
4163:
4162:
4157:
4155:
4150:
4139:
4112:
4110:
4109:
4104:
4095:
4087:
4085:
4084:
4080:
4079:
4059:
4057:
4043:
4028:
4026:
4012:
4002:
3993:
3991:
3990:
3989:
3988:
3974:
3972:
3958:
3937:
3935:
3934:
3929:
3890:
3888:
3887:
3882:
3861:
3859:
3858:
3853:
3841:
3839:
3838:
3833:
3812:
3810:
3809:
3804:
3756:
3754:
3753:
3748:
3733:
3731:
3717:
3707:
3698:
3696:
3695:
3694:
3693:
3679:
3677:
3663:
3642:
3640:
3639:
3634:
3610:
3608:
3607:
3602:
3581:
3579:
3578:
3573:
3561:
3559:
3558:
3553:
3532:
3530:
3529:
3524:
3509:
3507:
3506:
3501:
3474:
3472:
3458:
3448:
3439:
3437:
3436:
3435:
3434:
3420:
3418:
3404:
3385:
3383:
3382:
3377:
3356:
3354:
3353:
3348:
3346:
3345:
3323:
3321:
3320:
3315:
3258:
3256:
3255:
3250:
3248:
3246:
3223:
3206:
3152:
3150:
3149:
3144:
3132:
3130:
3129:
3124:
3106:
3104:
3103:
3098:
3077:
3075:
3074:
3069:
3036:
3034:
3033:
3028:
2995:
2993:
2992:
2987:
2966:
2964:
2963:
2958:
2940:
2938:
2937:
2932:
2904:
2902:
2901:
2896:
2875:
2873:
2872:
2867:
2837:
2835:
2834:
2829:
2795:
2793:
2792:
2787:
2764:times such that
2763:
2761:
2760:
2755:
2744:
2742:
2741:
2736:
2706:
2704:
2703:
2698:
2696:
2695:
2670:
2668:
2667:
2662:
2641:
2639:
2638:
2633:
2612:
2610:
2609:
2604:
2592:
2590:
2589:
2584:
2572:
2570:
2569:
2564:
2562:
2561:
2545:
2543:
2542:
2537:
2510:
2508:
2507:
2502:
2490:
2488:
2487:
2482:
2480:
2479:
2463:
2461:
2460:
2455:
2434:
2432:
2431:
2426:
2414:
2412:
2411:
2406:
2404:
2403:
2374:
2372:
2371:
2366:
2345:
2343:
2342:
2337:
2310:
2308:
2307:
2302:
2275:
2273:
2272:
2267:
2240:
2238:
2237:
2232:
2207:
2205:
2204:
2199:
2178:
2176:
2175:
2170:
2143:
2141:
2140:
2135:
2108:
2106:
2105:
2100:
2073:
2071:
2070:
2065:
2034:
2032:
2031:
2026:
2005:
2003:
2002:
1997:
1976:
1974:
1973:
1968:
1947:
1945:
1944:
1939:
1918:
1916:
1915:
1910:
1889:
1887:
1886:
1881:
1831:
1829:
1828:
1823:
1821:
1820:
1804:
1802:
1801:
1796:
1775:
1773:
1772:
1767:
1765:
1764:
1748:
1746:
1745:
1740:
1719:
1717:
1716:
1711:
1681:
1679:
1678:
1673:
1661:
1659:
1658:
1653:
1637:
1635:
1634:
1629:
1605:
1603:
1602:
1597:
1585:
1583:
1582:
1577:
1556:
1554:
1553:
1548:
1546:
1533:
1508:
1506:
1505:
1500:
1495:
1494:
1476:
1475:
1450:
1448:
1447:
1442:
1418:
1416:
1415:
1410:
1389:
1387:
1386:
1381:
1360:
1358:
1357:
1352:
1350:
1349:
1333:
1331:
1330:
1325:
1313:
1311:
1310:
1305:
1293:
1291:
1290:
1285:
1260:
1258:
1257:
1252:
1231:
1229:
1228:
1223:
1211:
1209:
1208:
1203:
1201:
1200:
1183:complex analysis
1166:
1164:
1163:
1158:
1116:
1114:
1113:
1108:
1066:
1064:
1063:
1058:
1056:
1054:
1040:
1026:
987:
985:
984:
979:
968:
967:
954:
952:
951:
946:
935:
934:
918:
916:
915:
910:
880:
878:
877:
872:
861:
860:
847:
845:
844:
839:
828:
827:
810:
808:
807:
802:
781:
779:
778:
773:
762:
761:
744:
742:
741:
736:
712:
710:
709:
704:
699:
697:
683:
669:
655:
654:
634:
632:
631:
626:
615:
614:
590:
588:
587:
582:
545:
543:
542:
537:
491:
489:
488:
483:
481:
479:
447:
433:
417:
415:
414:
409:
388:
386:
385:
380:
287:-axis while the
221:Lyapunov methods
205:circle criterion
176:, it can handle
147:dynamical system
128:
108:stability theory
97:
87:
85:
84:
79:
77:
75:
62:
61:
48:
5593:
5592:
5586:
5585:
5584:
5582:
5581:
5580:
5556:
5555:
5534:MATLAB function
5520:
5454:
5452:Further reading
5449:
5448:
5439:
5437:
5428:
5427:
5423:
5418:Wayback Machine
5409:
5405:
5353:
5352:
5348:
5305:
5304:
5300:
5287:
5277:Strecker, Felix
5275:
5274:
5270:
5261:
5259:
5255:
5248:
5243:
5242:
5238:
5229:
5227:
5225:
5217:. p. 184.
5215:Springer-Verlag
5204:
5203:
5199:
5194:
5132:
5104:
5103:
5068:
5067:
5025:
5024:
4988:
4987:
4956:
4955:
4924:
4923:
4904:
4903:
4878:
4877:
4858:
4857:
4829:
4828:
4824:
4815:
4791:
4790:
4762:
4761:
4744:
4743:
4710:
4709:
4681:
4673:
4672:
4661:
4644:
4643:
4610:
4609:
4563:
4540:
4529:
4516:
4497:
4496:
4461:
4460:
4436:
4400:
4372:
4355:
4354:
4289:
4272:
4214:
4203:
4190:
4171:
4170:
4140:
4118:
4117:
4071:
4060:
4047:
4013:
3995:
3994:
3980:
3975:
3962:
3943:
3942:
3896:
3895:
3864:
3863:
3844:
3843:
3815:
3814:
3762:
3761:
3718:
3700:
3699:
3685:
3680:
3667:
3648:
3647:
3613:
3612:
3584:
3583:
3564:
3563:
3535:
3534:
3515:
3514:
3459:
3441:
3440:
3426:
3421:
3408:
3395:
3394:
3359:
3358:
3337:
3332:
3331:
3267:
3266:
3224:
3207:
3185:
3184:
3159:
3135:
3134:
3109:
3108:
3080:
3079:
3039:
3038:
2998:
2997:
2969:
2968:
2943:
2942:
2914:
2913:
2878:
2877:
2849:
2848:
2845:
2808:
2807:
2766:
2765:
2746:
2745:
2709:
2708:
2678:
2673:
2672:
2644:
2643:
2615:
2614:
2595:
2594:
2575:
2574:
2553:
2548:
2547:
2513:
2512:
2493:
2492:
2471:
2466:
2465:
2437:
2436:
2417:
2416:
2395:
2390:
2389:
2348:
2347:
2313:
2312:
2278:
2277:
2243:
2242:
2214:
2213:
2181:
2180:
2146:
2145:
2111:
2110:
2076:
2075:
2041:
2040:
2008:
2007:
1979:
1978:
1953:
1952:
1921:
1920:
1892:
1891:
1869:
1868:
1857:
1812:
1807:
1806:
1778:
1777:
1756:
1751:
1750:
1722:
1721:
1684:
1683:
1664:
1663:
1644:
1643:
1608:
1607:
1588:
1587:
1559:
1558:
1511:
1510:
1486:
1458:
1453:
1452:
1424:
1423:
1392:
1391:
1363:
1362:
1341:
1336:
1335:
1334:in the contour
1316:
1315:
1296:
1295:
1267:
1266:
1234:
1233:
1214:
1213:
1192:
1187:
1186:
1179:
1173:
1119:
1118:
1072:
1071:
1041:
1027:
993:
992:
957:
956:
924:
923:
886:
885:
850:
849:
848:. The poles of
817:
816:
784:
783:
751:
750:
745:are called the
718:
717:
684:
670:
644:
643:
604:
603:
552:
551:
501:
500:
448:
434:
427:
426:
391:
390:
362:
361:
347:
331:zeros and poles
257:parametric plot
236:
162:poles and zeros
122:
89:
53:
52:
27:
26:
17:
12:
11:
5:
5591:
5590:
5587:
5579:
5578:
5573:
5568:
5558:
5557:
5554:
5553:
5548:
5543:
5537:
5531:
5526:
5519:
5518:External links
5516:
5515:
5514:
5500:
5486:
5472:Pippard, A. B.
5469:
5453:
5450:
5447:
5446:
5421:
5403:
5346:
5307:Nyquist, Harry
5298:
5268:
5236:
5223:
5196:
5195:
5193:
5190:
5189:
5188:
5183:
5178:
5173:
5168:
5163:
5158:
5153:
5148:
5143:
5138:
5136:BIBO stability
5131:
5128:
5127:
5126:
5114:
5111:
5087:
5084:
5081:
5078:
5075:
5064:
5053:
5041:
5038:
5035:
5032:
5004:
5001:
4998:
4995:
4984:
4972:
4969:
4966:
4963:
4952:
4940:
4937:
4934:
4931:
4911:
4891:
4888:
4885:
4865:
4845:
4842:
4839:
4836:
4823:
4820:
4814:
4811:
4798:
4778:
4775:
4772:
4769:
4758:
4757:
4740: in ORHP)
4737:
4734:
4731:
4728:
4720:
4715:
4713:
4711:
4702:
4698:
4694:
4691:
4682:
4678:
4675:
4674:
4671:
4668:
4665:
4662:
4658:
4655:
4652:
4651:
4628:
4624:
4620:
4617:
4602:
4601:
4590:
4587:
4580:
4576:
4572:
4569:
4566:
4562:
4555:
4552:
4547:
4543:
4539:
4536:
4532:
4525:
4522:
4519:
4515:
4510:
4507:
4504:
4477:
4474:
4471:
4468:
4448:
4443:
4439:
4435:
4432:
4429:
4423:
4418:
4415:
4412:
4407:
4403:
4399:
4396:
4390:
4387:
4384:
4379:
4375:
4371:
4368:
4365:
4362:
4351:
4350:
4339:
4336:
4329:
4325:
4321:
4318:
4315:
4311:
4304:
4301:
4296:
4292:
4288:
4285:
4282:
4279:
4275:
4268:
4265:
4262:
4257:
4251:
4248:
4245:
4242:
4236:
4233:
4226:
4221:
4217:
4213:
4210:
4206:
4199:
4196:
4193:
4189:
4184:
4181:
4178:
4153:
4149:
4146:
4143:
4137:
4134:
4131:
4128:
4125:
4114:
4113:
4102:
4099:
4093:
4090:
4083:
4078:
4074:
4070:
4067:
4063:
4056:
4053:
4050:
4046:
4041:
4038:
4035:
4032:
4025:
4022:
4019:
4016:
4011:
4008:
4005:
4001:
3998:
3987:
3983:
3978:
3971:
3968:
3965:
3961:
3956:
3953:
3950:
3927:
3924:
3921:
3918:
3915:
3912:
3909:
3906:
3903:
3880:
3877:
3874:
3871:
3851:
3831:
3828:
3825:
3822:
3802:
3799:
3796:
3793:
3790:
3787:
3784:
3781:
3778:
3775:
3772:
3769:
3758:
3757:
3746:
3743:
3740:
3737:
3730:
3727:
3724:
3721:
3716:
3713:
3710:
3706:
3703:
3692:
3688:
3683:
3676:
3673:
3670:
3666:
3661:
3658:
3655:
3632:
3629:
3626:
3623:
3620:
3600:
3597:
3594:
3591:
3571:
3551:
3548:
3545:
3542:
3522:
3511:
3510:
3499:
3496:
3493:
3490:
3487:
3484:
3481:
3478:
3471:
3468:
3465:
3462:
3457:
3454:
3451:
3447:
3444:
3433:
3429:
3424:
3417:
3414:
3411:
3407:
3402:
3375:
3372:
3369:
3366:
3344:
3340:
3325:
3324:
3313:
3310:
3307:
3304:
3301:
3298:
3295:
3292:
3289:
3286:
3283:
3280:
3277:
3274:
3260:
3259:
3245:
3242:
3239:
3236:
3233:
3230:
3227:
3222:
3219:
3216:
3213:
3210:
3204:
3201:
3198:
3195:
3192:
3158:
3155:
3142:
3122:
3119:
3116:
3096:
3093:
3090:
3087:
3067:
3064:
3061:
3058:
3055:
3052:
3049:
3046:
3026:
3023:
3020:
3017:
3014:
3011:
3008:
3005:
2985:
2982:
2979:
2976:
2956:
2953:
2950:
2930:
2927:
2924:
2921:
2894:
2891:
2888:
2885:
2865:
2862:
2859:
2856:
2844:
2841:
2827:
2824:
2821:
2818:
2815:
2785:
2782:
2779:
2776:
2773:
2753:
2734:
2731:
2728:
2725:
2722:
2719:
2716:
2694:
2691:
2688:
2685:
2681:
2660:
2657:
2654:
2651:
2631:
2628:
2625:
2622:
2602:
2582:
2560:
2556:
2535:
2532:
2529:
2526:
2523:
2520:
2500:
2478:
2474:
2453:
2450:
2447:
2444:
2424:
2402:
2398:
2364:
2361:
2358:
2355:
2335:
2332:
2329:
2326:
2323:
2320:
2300:
2297:
2294:
2291:
2288:
2285:
2265:
2262:
2259:
2256:
2253:
2250:
2230:
2227:
2224:
2221:
2197:
2194:
2191:
2188:
2168:
2165:
2162:
2159:
2156:
2153:
2133:
2130:
2127:
2124:
2121:
2118:
2098:
2095:
2092:
2089:
2086:
2083:
2063:
2060:
2057:
2054:
2051:
2048:
2037:
2036:
2024:
2021:
2018:
2015:
1995:
1992:
1989:
1986:
1966:
1963:
1960:
1949:
1937:
1934:
1931:
1928:
1908:
1905:
1902:
1899:
1879:
1876:
1856:
1853:
1819:
1815:
1794:
1791:
1788:
1785:
1763:
1759:
1738:
1735:
1732:
1729:
1709:
1706:
1703:
1700:
1697:
1694:
1691:
1671:
1651:
1627:
1624:
1621:
1618:
1615:
1595:
1575:
1572:
1569:
1566:
1545:
1542:
1539:
1536:
1532:
1528:
1525:
1521:
1518:
1498:
1493:
1489:
1485:
1482:
1479:
1474:
1471:
1468:
1465:
1461:
1440:
1437:
1434:
1431:
1408:
1405:
1402:
1399:
1379:
1376:
1373:
1370:
1348:
1344:
1323:
1303:
1283:
1280:
1277:
1274:
1250:
1247:
1244:
1241:
1221:
1199:
1195:
1175:Main article:
1172:
1169:
1156:
1153:
1150:
1147:
1144:
1141:
1138:
1135:
1132:
1129:
1126:
1106:
1103:
1100:
1097:
1094:
1091:
1088:
1085:
1082:
1079:
1068:
1067:
1053:
1050:
1047:
1044:
1039:
1036:
1033:
1030:
1024:
1021:
1018:
1015:
1012:
1009:
1006:
1003:
1000:
977:
974:
971:
966:
944:
941:
938:
933:
908:
905:
902:
899:
896:
893:
870:
867:
864:
859:
837:
834:
831:
826:
800:
797:
794:
791:
771:
768:
765:
760:
734:
731:
728:
725:
714:
713:
702:
696:
693:
690:
687:
682:
679:
676:
673:
667:
664:
661:
658:
653:
624:
621:
618:
613:
600:Laplace domain
580:
577:
574:
571:
568:
565:
562:
559:
535:
532:
529:
526:
523:
520:
517:
514:
511:
508:
493:
492:
478:
475:
472:
469:
466:
463:
460:
457:
454:
451:
446:
443:
440:
437:
407:
404:
401:
398:
378:
375:
372:
369:
346:
343:
289:imaginary part
235:
232:
120:Felix Strecker
104:control theory
74:
71:
68:
65:
60:
56:
51:
46:
43:
40:
37:
34:
15:
13:
10:
9:
6:
4:
3:
2:
5589:
5588:
5577:
5574:
5572:
5569:
5567:
5564:
5563:
5561:
5552:
5549:
5547:
5544:
5541:
5538:
5535:
5532:
5530:
5527:
5525:
5522:
5521:
5517:
5513:
5512:0-13-032393-4
5509:
5505:
5501:
5499:
5498:83-7335-176-0
5495:
5491:
5487:
5485:
5484:0-521-31994-3
5481:
5477:
5473:
5470:
5468:
5467:0-412-09400-2
5464:
5460:
5456:
5455:
5451:
5435:
5431:
5425:
5422:
5419:
5415:
5412:
5411:Nyquist Plots
5407:
5404:
5399:
5395:
5391:
5387:
5383:
5379:
5374:
5369:
5365:
5361:
5357:
5350:
5347:
5342:
5338:
5334:
5330:
5326:
5322:
5318:
5317:
5312:
5308:
5302:
5299:
5291:
5286:
5282:
5278:
5272:
5269:
5254:
5247:
5240:
5237:
5226:
5220:
5216:
5212:
5208:
5201:
5198:
5191:
5187:
5184:
5182:
5179:
5177:
5174:
5172:
5169:
5167:
5164:
5162:
5159:
5157:
5154:
5152:
5149:
5147:
5144:
5142:
5139:
5137:
5134:
5133:
5129:
5112:
5109:
5101:
5085:
5082:
5079:
5076:
5073:
5065:
5062:
5059: +
5058:
5054:
5036:
5030:
5022:
5018:
4999:
4993:
4985:
4967:
4961:
4953:
4935:
4929:
4909:
4889:
4886:
4883:
4863:
4840:
4834:
4826:
4825:
4821:
4819:
4812:
4810:
4796:
4773:
4767:
4732:
4726:
4718:
4714:
4700:
4696:
4692:
4689:
4676:
4669:
4666:
4663:
4656:
4653:
4642:
4641:
4640:
4626:
4622:
4618:
4615:
4607:
4588:
4585:
4578:
4574:
4570:
4567:
4564:
4560:
4545:
4534:
4530:
4523:
4520:
4517:
4513:
4508:
4505:
4502:
4495:
4494:
4493:
4491:
4472:
4466:
4441:
4430:
4427:
4421:
4416:
4413:
4405:
4394:
4388:
4377:
4366:
4360:
4337:
4334:
4327:
4323:
4319:
4316:
4313:
4309:
4294:
4283:
4277:
4273:
4266:
4263:
4260:
4255:
4249:
4246:
4243:
4240:
4234:
4231:
4219:
4208:
4204:
4197:
4194:
4191:
4187:
4182:
4179:
4176:
4169:
4168:
4167:
4151:
4147:
4144:
4141:
4135:
4129:
4123:
4100:
4097:
4091:
4088:
4076:
4065:
4061:
4054:
4051:
4048:
4044:
4039:
4036:
4033:
4030:
4020:
4014:
4006:
3999:
3996:
3985:
3976:
3969:
3966:
3963:
3959:
3954:
3951:
3948:
3941:
3940:
3939:
3922:
3916:
3913:
3907:
3901:
3892:
3875:
3869:
3849:
3826:
3820:
3797:
3791:
3788:
3785:
3782:
3779:
3773:
3767:
3744:
3741:
3738:
3735:
3725:
3719:
3711:
3704:
3701:
3690:
3681:
3674:
3671:
3668:
3664:
3659:
3656:
3653:
3646:
3645:
3644:
3630:
3627:
3624:
3621:
3618:
3595:
3589:
3569:
3546:
3540:
3520:
3497:
3494:
3491:
3488:
3485:
3482:
3479:
3476:
3466:
3460:
3452:
3445:
3442:
3431:
3422:
3415:
3412:
3409:
3405:
3400:
3393:
3392:
3391:
3390:states that
3389:
3370:
3364:
3342:
3328:
3311:
3308:
3302:
3296:
3293:
3290:
3287:
3284:
3278:
3272:
3265:
3264:
3263:
3240:
3234:
3231:
3228:
3225:
3217:
3211:
3208:
3202:
3196:
3190:
3183:
3182:
3181:
3179:
3172:
3168:
3163:
3156:
3154:
3140:
3120:
3117:
3114:
3091:
3085:
3062:
3059:
3056:
3050:
3047:
3044:
3021:
3018:
3015:
3009:
3006:
3003:
2983:
2980:
2977:
2974:
2954:
2948:
2928:
2925:
2922:
2919:
2910:
2908:
2892:
2889:
2886:
2883:
2860:
2854:
2842:
2840:
2825:
2822:
2819:
2816:
2813:
2805:
2798:
2797:
2783:
2780:
2777:
2774:
2771:
2751:
2729:
2726:
2723:
2720:
2717:
2689:
2683:
2655:
2649:
2626:
2620:
2600:
2580:
2558:
2546:encircled by
2530:
2524:
2521:
2518:
2498:
2476:
2464:encircled by
2448:
2442:
2422:
2400:
2384:
2383:
2381:
2380:
2359:
2353:
2330:
2324:
2321:
2318:
2295:
2289:
2286:
2283:
2260:
2254:
2251:
2248:
2225:
2219:
2211:
2192:
2186:
2163:
2157:
2154:
2151:
2128:
2122:
2119:
2116:
2093:
2087:
2084:
2081:
2058:
2052:
2049:
2046:
2019:
2016:
2013:
1990:
1987:
1984:
1958:
1950:
1932:
1929:
1926:
1903:
1900:
1897:
1877:
1874:
1866:
1865:
1864:
1862:
1854:
1852:
1850:
1846:
1842:
1841:Harry Nyquist
1837:
1835:
1817:
1789:
1783:
1761:
1733:
1727:
1720:and poles of
1704:
1698:
1695:
1692:
1689:
1669:
1649:
1641:
1625:
1622:
1619:
1616:
1613:
1606:times, where
1593:
1570:
1564:
1543:
1540:
1537:
1534:
1530:
1526:
1523:
1519:
1516:
1491:
1480:
1477:
1469:
1463:
1435:
1429:
1420:
1403:
1397:
1374:
1368:
1346:
1321:
1301:
1278:
1272:
1264:
1245:
1239:
1219:
1197:
1185:, a contour
1184:
1178:
1168:
1154:
1151:
1145:
1139:
1136:
1130:
1124:
1101:
1095:
1089:
1083:
1080:
1077:
1048:
1042:
1034:
1028:
1022:
1016:
1010:
1004:
998:
991:
990:
989:
972:
939:
920:
906:
903:
897:
891:
884:
865:
832:
814:
795:
789:
766:
748:
729:
723:
716:The roots of
700:
691:
685:
677:
671:
665:
659:
642:
641:
640:
638:
619:
601:
596:
594:
575:
569:
563:
557:
549:
530:
524:
518:
512:
509:
506:
498:
473:
467:
461:
455:
452:
449:
441:
435:
425:
424:
423:
421:
402:
396:
373:
367:
358:
356:
352:
344:
342:
338:
336:
332:
327:
325:
324:feedback loop
321:
316:
314:
310:
309:Harry Nyquist
306:
302:
298:
294:
290:
286:
282:
278:
274:
270:
266:
262:
258:
254:
246:
240:
233:
231:
229:
224:
222:
218:
214:
210:
206:
202:
198:
194:
190:
185:
183:
179:
175:
171:
167:
166:singularities
163:
159:
155:
150:
148:
144:
140:
136:
135:Harry Nyquist
132:
126:
121:
117:
113:
109:
105:
96:
92:
72:
69:
66:
63:
58:
54:
49:
44:
38:
32:
23:
19:
5503:
5489:
5475:
5458:
5438:. Retrieved
5436:. 2017-09-05
5433:
5424:
5406:
5363:
5359:
5349:
5320:
5314:
5301:
5280:
5271:
5260:. Retrieved
5239:
5228:. Retrieved
5210:
5200:
5166:Phase margin
5161:Hall circles
5156:Nichols plot
5060:
5056:
5020:
5016:
4816:
4759:
4604:by applying
4603:
4490:Nyquist plot
4352:
4115:
3893:
3759:
3512:
3386:. Cauchy's
3329:
3326:
3261:
3177:
3175:
3170:
3166:
2911:
2846:
2803:
2800:
2387:
2386:
2378:
2377:
2376:
2210:Nyquist Plot
2038:
1860:
1858:
1845:Hendrik Bode
1838:
1833:
1421:
1180:
1069:
921:
882:
812:
746:
715:
597:
591:, using its
494:
359:
354:
348:
339:
328:
317:
292:
284:
253:Nyquist plot
252:
250:
244:
234:Nyquist plot
225:
186:
154:Nyquist plot
153:
151:
115:
111:
101:
94:
90:
18:
5288: [
5151:Gain margin
1890:axis, from
1390:in the new
637:polynomials
548:Routh array
189:electronics
123: [
5560:Categories
5440:2023-12-25
5373:2107.11272
5323:(1). USA:
5262:2019-06-14
5230:2019-06-14
5192:References
4813:Importance
3938:, we have
1855:Definition
593:Bode plots
345:Background
228:Bode plots
174:Bode plots
5398:236318576
5390:0018-9286
5341:115002788
5141:Bode plot
5113:ω
5074:−
4884:ω
4690:−
4616:−
4542:Γ
4531:∮
4521:π
4509:−
4438:Γ
4414:−
4402:Γ
4374:Γ
4291:Γ
4274:∮
4264:π
4250:−
4216:Γ
4205:∮
4195:π
4183:−
4145:−
4073:Γ
4062:∮
4052:π
4040:−
3982:Γ
3977:∮
3967:π
3955:−
3687:Γ
3682:∮
3672:π
3660:−
3495:−
3428:Γ
3423:∮
3413:π
3401:−
3339:Γ
3121:π
3115:−
3057:ω
3019:−
3016:ω
2984:ω
2952:→
2929:ω
2893:ω
2814:−
2781:−
2718:−
2680:Γ
2555:Γ
2473:Γ
2397:Γ
2023:∞
2017:−
1994:∞
1965:∞
1962:→
1936:∞
1907:∞
1901:−
1878:ω
1814:Γ
1758:Γ
1623:−
1524:−
1488:Γ
1460:Γ
1343:Γ
1261:, can be
1194:Γ
277:real part
143:stability
5474:(1985):
5414:Archived
5279:(1947).
5253:Archived
5130:See also
5017:unstable
4000:′
3705:′
3446:′
3133:, where
2671:-plane,
1834:negative
811:are the
357:domain.
299:, where
269:feedback
207:and the
197:feedback
5021:counter
4822:Summary
2967:around
1642:. Here
1557:of the
333:of the
279:of the
156:of the
131:Siemens
5510:
5496:
5482:
5465:
5396:
5388:
5339:
5221:
3513:Where
2491:, and
2415:, let
1586:plane
1263:mapped
418:, the
275:, the
271:. In
110:, the
5394:S2CID
5368:arXiv
5337:S2CID
5292:]
5256:(PDF)
5249:(PDF)
5125:axis.
1181:From
813:poles
747:zeros
497:roots
305:phase
255:is a
219:like
211:of a
145:of a
127:]
88:with
5508:ISBN
5494:ISBN
5480:ISBN
5463:ISBN
5386:ISSN
5219:ISBN
1662:and
598:Any
301:gain
263:and
191:and
106:and
5378:doi
5329:doi
5015:is
2212:of
1919:to
1638:by
815:of
749:of
149:.
137:at
129:at
114:or
102:In
5562::
5432:.
5392:.
5384:.
5376:.
5364:68
5362:.
5358:.
5335:.
5321:11
5319:.
5313:.
5290:de
5251:.
5209:.
1167:.
919:.
639::
315:.
251:A
125:de
95:jω
93:=
5443:.
5400:.
5380::
5370::
5343:.
5331::
5294:.
5265:.
5233:.
5110:j
5086:0
5083:j
5080:+
5077:1
5061:P
5057:N
5040:)
5037:s
5034:(
5031:G
5003:)
5000:s
4997:(
4994:G
4971:)
4968:s
4965:(
4962:G
4939:)
4936:s
4933:(
4930:G
4910:l
4890:0
4887:=
4864:l
4844:)
4841:s
4838:(
4835:G
4797:Z
4777:)
4774:s
4771:(
4768:T
4736:)
4733:s
4730:(
4727:G
4719:+
4701:k
4697:/
4693:1
4677:=
4670:P
4667:+
4664:N
4657:=
4654:Z
4627:k
4623:/
4619:1
4589:v
4586:d
4579:k
4575:/
4571:1
4568:+
4565:v
4561:1
4554:)
4551:)
4546:s
4538:(
4535:G
4524:i
4518:2
4514:1
4506:=
4503:N
4476:)
4473:s
4470:(
4467:G
4447:)
4442:s
4434:(
4431:G
4428:=
4422:k
4417:1
4411:)
4406:s
4398:(
4395:D
4389:=
4386:)
4383:)
4378:s
4370:(
4367:u
4364:(
4361:v
4338:v
4335:d
4328:k
4324:/
4320:1
4317:+
4314:v
4310:1
4303:)
4300:)
4295:s
4287:(
4284:u
4281:(
4278:v
4267:i
4261:2
4256:1
4247:=
4244:u
4241:d
4235:u
4232:1
4225:)
4220:s
4212:(
4209:u
4198:i
4192:2
4188:1
4180:=
4177:N
4152:k
4148:1
4142:u
4136:=
4133:)
4130:u
4127:(
4124:v
4101:u
4098:d
4092:u
4089:1
4082:)
4077:s
4069:(
4066:u
4055:i
4049:2
4045:1
4037:=
4034:s
4031:d
4024:)
4021:s
4018:(
4015:D
4010:)
4007:s
4004:(
3997:D
3986:s
3970:i
3964:2
3960:1
3952:=
3949:N
3926:)
3923:s
3920:(
3917:D
3914:=
3911:)
3908:s
3905:(
3902:u
3879:)
3876:s
3873:(
3870:G
3850:P
3830:)
3827:s
3824:(
3821:G
3801:)
3798:s
3795:(
3792:G
3789:k
3786:+
3783:1
3780:=
3777:)
3774:s
3771:(
3768:D
3745:P
3742:+
3739:s
3736:d
3729:)
3726:s
3723:(
3720:D
3715:)
3712:s
3709:(
3702:D
3691:s
3675:i
3669:2
3665:1
3657:=
3654:Z
3631:P
3628:+
3625:N
3622:=
3619:Z
3599:)
3596:s
3593:(
3590:D
3570:P
3550:)
3547:s
3544:(
3541:D
3521:Z
3498:P
3492:Z
3489:=
3486:N
3483:=
3480:s
3477:d
3470:)
3467:s
3464:(
3461:D
3456:)
3453:s
3450:(
3443:D
3432:s
3416:i
3410:2
3406:1
3374:)
3371:s
3368:(
3365:G
3343:s
3312:0
3309:=
3306:)
3303:s
3300:(
3297:G
3294:k
3291:+
3288:1
3285:=
3282:)
3279:s
3276:(
3273:D
3244:)
3241:s
3238:(
3235:G
3232:k
3229:+
3226:1
3221:)
3218:s
3215:(
3212:G
3209:k
3203:=
3200:)
3197:s
3194:(
3191:T
3178:k
3171:K
3167:G
3141:l
3118:l
3095:)
3092:s
3089:(
3086:G
3066:)
3063:r
3060:+
3054:(
3051:j
3048:+
3045:0
3025:)
3022:r
3013:(
3010:j
3007:+
3004:0
2981:j
2978:+
2975:0
2955:0
2949:r
2926:j
2923:+
2920:0
2890:j
2887:+
2884:0
2864:)
2861:s
2858:(
2855:G
2826:0
2823:j
2820:+
2817:1
2804:s
2796:.
2784:P
2778:Z
2775:=
2772:N
2752:N
2733:)
2730:0
2727:j
2724:+
2721:1
2715:(
2693:)
2690:s
2687:(
2684:G
2659:)
2656:s
2653:(
2650:G
2630:)
2627:s
2624:(
2621:G
2601:P
2581:Z
2559:s
2534:)
2531:s
2528:(
2525:G
2522:+
2519:1
2499:Z
2477:s
2452:)
2449:s
2446:(
2443:G
2423:P
2401:s
2382::
2363:)
2360:s
2357:(
2354:G
2334:)
2331:s
2328:(
2325:G
2322:+
2319:1
2299:)
2296:s
2293:(
2290:G
2287:+
2284:1
2264:)
2261:s
2258:(
2255:G
2252:+
2249:1
2229:)
2226:s
2223:(
2220:G
2196:)
2193:s
2190:(
2187:G
2167:)
2164:s
2161:(
2158:G
2155:+
2152:1
2132:)
2129:s
2126:(
2123:G
2120:+
2117:1
2097:)
2094:s
2091:(
2088:G
2085:+
2082:1
2062:)
2059:s
2056:(
2053:G
2050:+
2047:1
2035:.
2020:j
2014:0
1991:j
1988:+
1985:0
1959:r
1948:.
1933:j
1930:+
1927:0
1904:j
1898:0
1875:j
1818:s
1793:)
1790:s
1787:(
1784:F
1762:s
1737:)
1734:s
1731:(
1728:F
1708:)
1705:s
1702:(
1699:F
1696:k
1693:+
1690:1
1670:P
1650:Z
1626:Z
1620:P
1617:=
1614:N
1594:N
1574:)
1571:s
1568:(
1565:F
1544:0
1541:j
1538:+
1535:k
1531:/
1527:1
1520:=
1517:s
1497:)
1492:s
1484:(
1481:F
1478:=
1473:)
1470:s
1467:(
1464:F
1439:)
1436:s
1433:(
1430:F
1407:)
1404:s
1401:(
1398:F
1378:)
1375:s
1372:(
1369:F
1347:s
1322:s
1302:F
1282:)
1279:s
1276:(
1273:F
1249:)
1246:s
1243:(
1240:F
1220:s
1198:s
1155:0
1152:=
1149:)
1146:s
1143:(
1140:B
1137:+
1134:)
1131:s
1128:(
1125:A
1105:)
1102:s
1099:(
1096:H
1093:)
1090:s
1087:(
1084:G
1081:+
1078:1
1052:)
1049:s
1046:(
1043:B
1038:)
1035:s
1032:(
1029:A
1023:=
1020:)
1017:s
1014:(
1011:H
1008:)
1005:s
1002:(
999:G
976:)
973:s
970:(
965:T
943:)
940:s
937:(
932:T
907:0
904:=
901:)
898:s
895:(
892:D
869:)
866:s
863:(
858:T
836:)
833:s
830:(
825:T
799:)
796:s
793:(
790:D
770:)
767:s
764:(
759:T
733:)
730:s
727:(
724:N
701:.
695:)
692:s
689:(
686:D
681:)
678:s
675:(
672:N
666:=
663:)
660:s
657:(
652:T
623:)
620:s
617:(
612:T
579:)
576:s
573:(
570:H
567:)
564:s
561:(
558:G
534:)
531:s
528:(
525:H
522:)
519:s
516:(
513:G
510:+
507:1
477:)
474:s
471:(
468:H
465:)
462:s
459:(
456:G
453:+
450:1
445:)
442:s
439:(
436:G
406:)
403:s
400:(
397:H
377:)
374:s
371:(
368:G
355:s
293:Y
285:X
245:X
98:.
91:s
73:1
70:+
67:s
64:+
59:2
55:s
50:1
45:=
42:)
39:s
36:(
33:G
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.