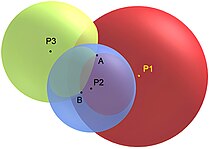
241:, it is known that if a point lies on two circles, then the circle centers and the two radii provide sufficient information to narrow the possible locations down to two – one of which is the desired solution and the other is an ambiguous solution. Additional information often narrow the possibilities down to a unique location. In three-dimensional geometry, when it is known that a point lies on the surfaces of three spheres, then the centers of the three spheres along with their radii also provide sufficient information to narrow the possible locations down to no more than two (unless the centers lie on a straight line).
39:
31:
328:
In navigation applications, the vehicle is often termed the "user"; in surveillance applications, the vehicle may be termed the "target". For a mathematically exact solution, the ranges must not change during the period the signals are received (between first and last to arrive at a receiver). Thus,
681:
addressed second. They were implemented, roughly, post-1975 and usually involve satellites. Due to technology advances, TOT algorithms generally determine a user/vehicle location in three dimensions. However, conceptually, TDOA or TOT algorithms are not linked to the number of dimensions involved.
680:
Systems have been developed for both TOT and TDOA (which ignore TOT) algorithms. In this article, TDOA algorithms are addressed first, as they were implemented first. Due to the technology available at the time, TDOA systems often determined a vehicle location in two dimensions. TOT systems are
677:
system provides vehicle position to an entity "not on" the vehicle (e.g., air traffic controller or cell phone provider). By the reciprocity principle, any method that can be used for navigation can also be used for surveillance, and vice versa (the same information is involved).
233:
problem. Moreover, if more than the minimum number of ranges are available, it is good practice to utilize those as well. This article addresses the general issue of position determination using multiple ranges.
329:
for navigation, an exact solution requires a stationary vehicle; however, multilateration is often applied to the navigation of moving vehicles whose speed is much less than the wave propagation speed.
313:(TOT) of the waves is unknown to the receiver(s), either on the vehicle (one receiver, navigation) or at the stations (multiple receivers, surveillance). Consequently, also unknown is the wave
219:
from two known locations can be used to locate a third point in a two-dimensional
Cartesian space (plane), which is a frequently applied technique (e.g., in surveying). Similarly, two
195:) between the vehicle/point and multiple spatially-separated known locations (often termed "stations"). Energy waves may be involved in determining range, but are not required.
187:(also termed range-range multilateration and spherical multilateration) is a method to determine the location of a movable vehicle or stationary point in space using multiple
143:
without modification has been used for aviation systems employing both true-ranges and pseudo-ranges. Moreover, different fields of endeavor may employ different terms. In
402:
198:
True-range multilateration is both a mathematical topic and an applied technique used in several fields. A practical application involving a fixed location occurs in
290:(TOAs) of energy waves traveling between the unknown point and multiple stations at known locations. When the waves are transmitted by the vehicle, MLAT is used for
656:
630:
560:
604:
580:
534:
506:
486:
466:
446:
422:
370:
350:
766:
516:
is usually required to solve this set of equations. An algorithm either: (a) determines numerical values for the TOT (for the receiver(s) clock) and
797:, Harry B. Lee, Massachusetts Institute of Technology, Lincoln Laboratory, Report Number: DOT/TSC-RA-3-8-(1) (Technical note 1973-43), Oct. 11, 1973
247:, which employs range differences to locate a (typically, movable) point. Pseudo range multilateration is almost always implemented by measuring
671:
system provides vehicle position information to an entity "on" the vehicle (e.g., aircraft pilot or GPS receiver operator). A multilateration
710:
151:
is defined as the process of determining absolute or relative locations of points by measurement of distances, using the geometry of
325:
is the corresponding TOA multiplied by the propagation speed with the same arbitrary constant added (representing the unknown TOT).
277:
270:
244:
100:
583:
184:
177:
90:
319:(TOFs) – the ranges of the vehicle from the stations divided by the wave propagation speed. Each
252:
922:
128:
763:
512:
Processing is usually required to extract the TOAs or their differences from the received signals, and an
807:
300:
225:
can be used to locate a point on a sphere, which is a fundamental concept of the ancient discipline of
859:
Escobal, P. R.; Fliegel, H. F.; Jaffe, R. M.; Muller, P. M.; Ong, K. M.; Vonroos, O. H. (2013-08-07).
309:
226:
124:
54:
752:
304:). In either case, the stations' clocks are assumed synchronized but the vehicle's clock is not.
238:
81:
73:
139:
Multiple, sometimes overlapping and conflicting terms are employed for similar concepts – e.g.,
375:
917:
841:
706:
700:
119:
352:
is the number of physical dimensions being considered (thus, vehicle coordinates sought) and
833:
58:
17:
770:
286:
248:
221:
635:
609:
539:
731:"Multilateration (MLAT) Concept of use", International Civil Aviation Organization, 2007
589:
565:
519:
491:
471:
451:
431:
407:
355:
335:
315:
281:
62:
911:
740:
109:
85:
673:
321:
291:
207:
95:
781:
243:
True-range multilateration can be contrasted to the more frequently encountered
215:
77:
30:
860:
667:
295:
203:
38:
845:
372:
is the number of signals received (thus, TOAs measured), it is required that
251:(TOAs) of energy waves. True-range multilateration can also be contrasted to
206:
when on-board persons/equipment are informed of its location, and are termed
513:
199:
50:
837:
792:
280:, often simply multilateration (MLAT) when in context, is a technique for
658:(e.g., the real physical world). Systems that form TDOAs are also called
192:
160:
144:
808:
Rho-Rho Loran-C Combined with
Satellite Navigation for Offshore Surveys
794:
Accuracy limitations of range-range (spherical) multilateration systems
188:
156:
152:
284:
of an unknown point, such as a vehicle, based on measurement of the
294:; when the waves are transmitted by the stations, MLAT is used for
890:
256:
210:
when off-vehicle entities are informed of the vehicle's location.
114:
37:
29:
65:). When more than three distances are involved, it may be called
861:"A 3-D Multilateration: A Precision Geodetic Measurement System"
27:
Use of distances for determining unknown coordinates of a point
107:
Trilateration or multilateration should not be confused with
832:(1). American Society of Civil Engineers (ASCE): 81–92.
824:
536:
vehicle coordinates; or (b) ignores the TOT and forms
638:
612:
592:
568:
542:
522:
494:
474:
454:
434:
410:
378:
358:
338:
202:. Applications involving vehicle location are termed
705:. American Society of Civil Engineers. p. 548.
488:
expressions) + TOT (one unknown variable replicated
650:
624:
598:
574:
554:
528:
500:
480:
460:
440:
416:
396:
364:
344:
632:(e.g., a plane or the surface of a sphere) or
826:Journal of the Surveying and Mapping Division
8:
34:Trilateration in three-dimensional geometry
307:Prior to computing a solution, the common
72:The distances or ranges might be ordinary
53:(or "ranges") for determining the unknown
637:
611:
591:
567:
541:
521:
493:
473:
453:
433:
409:
377:
357:
337:
42:Intersection point of three pseudo-ranges
691:
662:systems, for reasons discussed below.
123:, which determines the line of sight
7:
891:"Hyperbolic Radionavigation Systems"
606:vehicle coordinates. Almost always,
586:(TDOAs), which are used to find the
255:, which involves the measurement of
127:to a target without determining the
25:
812:International Hydrographic Review
61:of interest, often around Earth (
702:Glossary of the Mapping Sciences
269:This section is an excerpt from
176:This section is an excerpt from
404:. Then, the fundamental set of
468:unknown variables embedded in
1:
278:Pseudo-range multilateration
271:Pseudo-range multilateration
264:Pseudo-range multilateration
245:pseudo-range multilateration
101:pseudo-range multilateration
584:time difference of arrivals
18:Pseudorange multilateration
939:
743:, Christian Wolff, undated
699:Engineers, A.S.C. (1994).
424:measurement equations is:
268:
185:True-range multilateration
178:True-range multilateration
175:
171:True-range multilateration
167:is a specific technique.
91:true-range multilateration
397:{\displaystyle m\geq d+1}
282:determining the position
239:two-dimensional geometry
753:Encyclopædia Britannica
94:; or biased distances (
838:10.1061/jsueax.0000322
652:
626:
600:
576:
556:
530:
502:
482:
462:
448:measurements) = TOFs (
442:
418:
398:
366:
346:
43:
35:
653:
627:
601:
577:
557:
531:
503:
483:
463:
443:
419:
399:
367:
347:
301:hyperbolic navigation
117:for positioning; and
41:
33:
889:Proc, Jerry (2021).
865:JPL Quart. Tech. Rev
636:
610:
590:
566:
540:
520:
492:
472:
452:
432:
408:
376:
356:
336:
310:time of transmission
227:celestial navigation
55:position coordinates
651:{\displaystyle d=3}
625:{\displaystyle d=2}
555:{\displaystyle m-1}
82:spherical distances
74:Euclidean distances
769:2010-08-12 at the
665:A multilateration
648:
622:
596:
572:
552:
526:
498:
478:
458:
438:
414:
394:
362:
342:
231:altitude intercept
44:
36:
712:978-0-7844-7570-6
599:{\displaystyle d}
575:{\displaystyle d}
529:{\displaystyle d}
501:{\displaystyle m}
481:{\displaystyle m}
461:{\displaystyle d}
441:{\displaystyle m}
417:{\displaystyle m}
365:{\displaystyle m}
345:{\displaystyle d}
120:direction finding
16:(Redirected from
930:
902:
901:
899:
897:
886:
880:
879:
877:
876:
856:
850:
849:
821:
815:
804:
798:
790:
784:
779:
773:
761:
755:
750:
744:
738:
732:
729:
723:
722:
720:
719:
696:
657:
655:
654:
649:
631:
629:
628:
623:
605:
603:
602:
597:
581:
579:
578:
573:
561:
559:
558:
553:
535:
533:
532:
527:
507:
505:
504:
499:
487:
485:
484:
479:
467:
465:
464:
459:
447:
445:
444:
439:
423:
421:
420:
415:
403:
401:
400:
395:
371:
369:
368:
363:
351:
349:
348:
343:
287:times of arrival
249:times-of-arrival
222:spherical ranges
163:. In surveying,
69:, for emphasis.
21:
938:
937:
933:
932:
931:
929:
928:
927:
908:
907:
906:
905:
895:
893:
888:
887:
883:
874:
872:
858:
857:
853:
823:
822:
818:
810:". S.T. Grant,
805:
801:
791:
787:
782:free dictionary
780:
776:
771:Wayback Machine
762:
758:
751:
747:
739:
735:
730:
726:
717:
715:
713:
698:
697:
693:
688:
683:
682:
634:
633:
608:
607:
588:
587:
564:
563:
538:
537:
518:
517:
490:
489:
470:
469:
450:
449:
430:
429:
406:
405:
374:
373:
354:
353:
334:
333:
316:times of flight
274:
266:
261:
260:
181:
173:
141:multilateration
137:
129:radial distance
67:multilateration
28:
23:
22:
15:
12:
11:
5:
936:
934:
926:
925:
923:Geopositioning
920:
910:
909:
904:
903:
881:
851:
816:
799:
785:
774:
756:
745:
741:"Radar Basics"
733:
724:
711:
690:
689:
687:
684:
647:
644:
641:
621:
618:
615:
595:
571:
551:
548:
545:
525:
510:
509:
497:
477:
457:
437:
413:
393:
390:
387:
384:
381:
361:
341:
275:
267:
265:
262:
182:
174:
172:
169:
136:
133:
86:central angles
63:geopositioning
49:is the use of
26:
24:
14:
13:
10:
9:
6:
4:
3:
2:
935:
924:
921:
919:
916:
915:
913:
892:
885:
882:
870:
866:
862:
855:
852:
847:
843:
839:
835:
831:
827:
820:
817:
813:
809:
803:
800:
796:
795:
789:
786:
783:
778:
775:
772:
768:
765:
760:
757:
754:
749:
746:
742:
737:
734:
728:
725:
714:
708:
704:
703:
695:
692:
685:
679:
676:
675:
670:
669:
663:
661:
645:
642:
639:
619:
616:
613:
593:
585:
569:
549:
546:
543:
523:
515:
495:
475:
455:
435:
427:
426:
425:
411:
391:
388:
385:
382:
379:
359:
339:
330:
326:
324:
323:
318:
317:
312:
311:
305:
303:
302:
297:
293:
289:
288:
283:
279:
272:
263:
258:
254:
253:triangulation
250:
246:
242:
240:
235:
232:
229:— termed the
228:
224:
223:
218:
217:
211:
209:
205:
201:
196:
194:
190:
186:
179:
170:
168:
166:
165:trilateration
162:
158:
154:
150:
149:trilateration
146:
142:
134:
132:
130:
126:
122:
121:
116:
113:, which uses
112:
111:
110:triangulation
105:
103:
102:
97:
96:pseudo-ranges
93:
92:
87:
83:
79:
75:
70:
68:
64:
60:
56:
52:
48:
47:Trilateration
40:
32:
19:
894:. Retrieved
884:
873:. Retrieved
868:
864:
854:
829:
825:
819:
811:
802:
793:
788:
777:
759:
748:
736:
727:
716:. Retrieved
701:
694:
674:surveillance
672:
666:
664:
659:
511:
331:
327:
322:pseudo-range
320:
314:
308:
306:
299:
292:surveillance
285:
276:
236:
230:
220:
216:slant ranges
214:
212:
208:surveillance
197:
183:
164:
148:
140:
138:
118:
108:
106:
99:
89:
78:slant ranges
71:
66:
46:
45:
135:Terminology
912:Categories
875:2022-11-06
764:diracdelta
718:2022-11-07
686:References
668:navigation
660:hyperbolic
562:(at least
296:navigation
204:navigation
896:April 11,
846:0569-8073
814:, undated
547:−
514:algorithm
383:≥
200:surveying
193:distances
161:triangles
125:direction
98:), as in
88:), as in
51:distances
918:Geometry
767:Archived
145:geometry
84:(scaled
508:times).
157:spheres
153:circles
844:
709:
428:TOAs (
257:angles
189:ranges
115:angles
80:) or
59:point
57:of a
898:2022
842:ISSN
707:ISBN
213:Two
871:(3)
834:doi
332:If
237:In
159:or
914::
867:.
863:.
840:.
830:95
828:.
582:)
155:,
147:,
131:.
104:.
900:.
878:.
869:2
848:.
836::
806:"
721:.
646:3
643:=
640:d
620:2
617:=
614:d
594:d
570:d
550:1
544:m
524:d
496:m
476:m
456:d
436:m
412:m
392:1
389:+
386:d
380:m
360:m
340:d
298:(
273:.
259:.
191:(
180:.
76:(
20:)
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.