90:
176:
33:
791:
Inverse
Planning has been widely used in modeling agent's behavior in cognitive science to understand human's ability to interpret and infer other agents' latent mental states. It has increasingly been applied in Human-AI and Human-Robot interactions, allowing artificial agents to recognize the goals
508:
782:
Inverse planning can also be applied for inferring agent's beliefs, emotions, preferences, etc. Recent work in
Bayesian Inverse Planning has also been able to account for boundedly rational agent behavior, multi-modal interactions, and team actions in multi-agent systems.
315:
778:
302:
144:
refers to the process of inferring an agent's mental states, such as goals, beliefs, emotions, etc., from actions by assuming agents are rational planners. It is a method commonly used in
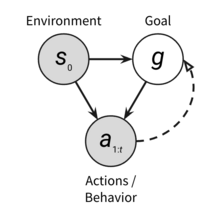
187:. The inference process can be represented with a graphical model shown on the right. In this causal diagram, a rational agent with a goal g produces a plan with a sequence of actions
552:
648:
218:
612:
592:
572:
1090:
947:
503:{\displaystyle P(a_{i}|g,s_{0})={\frac {\exp({\frac {1}{\beta }}Q(s_{0},a_{i}))}{\sum _{a_{j}}{\exp({\frac {1}{\beta }}Q(s_{0},a_{j})))}}}}
659:
106:
128:
99:
145:
306:
In the forward planning model, it is often assumed that the agent is rational. The agents' actions can then be derived from a
160:
1130:
Wu, Sarah A.; Wang, Rose E.; Evans, James A.; Tenenbaum, Joshua B.; Parkes, David C.; Kleiman-Weiner, Max (2021-04-07).
225:
1198:
1193:
149:
307:
1061:"NOPA: Neurally-guided Online Probabilistic Assistance for Building Socially Intelligent Home Assistants"
110:
934:
Zhi-Xuan, Tan; Mann, Jordyn L.; Silver, Tom; Tenenbaum, Joshua B.; Mansinghka, Vikash K. (2020-12-06).
164:
1108:
Pragmatic
Instruction Following and Goal Assistance via Cooperative Language-Guided Inverse Planning
43:
1143:
1111:
1068:
984:
953:
898:
515:
1169:
1161:
1086:
1041:
1002:
943:
916:
841:
833:
654:
to invert the conditional probability to find the posterior probability of the agent's goal.
620:
190:
1153:
1078:
1033:
994:
971:
Shum, Michael; Kleiman-Weiner, Max; Littman, Michael L.; Tenenbaum, Joshua B. (2019-07-17).
908:
886:
825:
597:
1020:
Baker, Chris L.; Jara-Ettinger, Julian; Saxe, Rebecca; Tenenbaum, Joshua B. (2017-03-13).
184:
1131:
1022:"Rational quantitative attribution of beliefs, desires and percepts in human mentalizing"
940:
Proceedings of the 34th
International Conference on Neural Information Processing Systems
972:
577:
557:
153:
105:
It may require cleanup to comply with
Knowledge (XXG)'s content policies, particularly
62:
1187:
957:
1082:
829:
1106:
Zhi-Xuan, Tan; Ying, Lance; Mansinghka, Vikash; Tenenbaum, Joshua B. (2024-02-27),
1059:
Puig, Xavier; Shu, Tianmin; Tenenbaum, Joshua B.; Torralba, Antonio (2023-05-29).
1021:
813:
998:
935:
1060:
17:
1132:"Too Many Cooks: Bayesian Inference for Coordinating Multi-Agent Collaboration"
912:
651:
175:
1165:
1045:
1006:
920:
885:
Ying, Lance; Zhi-Xuan, Tan; Mansinghka, Vikash; Tenenbaum, Joshua B. (2023).
837:
1037:
973:"Theory of Minds: Understanding Behavior in Groups through Inverse Planning"
863:
52:
1173:
887:"Inferring the Goals of Communicating Agents from Actions and Instructions"
845:
163:, which attempts to learn a reward function based on agents' behavior, and
32:
167:, which finds logically-consistent goals given the action observations.
1157:
936:"Online Bayesian goal inference for boundedly-rational planning agents"
812:
Baker, Chris L.; Saxe, Rebecca; Tenenbaum, Joshua B. (December 2009).
183:
Inverse
Planning is often framed with a Bayesian formulation, such as
1065:
2023 IEEE International
Conference on Robotics and Automation (ICRA)
1148:
1116:
1073:
989:
942:. NIPS'20. Red Hook, NY, USA: Curran Associates Inc.: 19238–19250.
903:
868:
Proceedings of the Annual
Meeting of the Cognitive Science Society
174:
773:{\displaystyle P(g|a_{1:t},s_{0})\propto P(a_{1:t}|g,s_{0})P(g)}
83:
26:
977:
Proceedings of the AAAI Conference on
Artificial Intelligence
862:
Baker, Chris L.; Tenenbaum, J. B.; Saxe, Rebecca R. (2007).
792:
and beliefs of human users in order to provide assistance.
57:
47:
98:
A major contributor to this article appears to have a
662:
623:
600:
580:
560:
518:
318:
228:
193:
772:
642:
606:
586:
566:
546:
502:
296:
212:
297:{\displaystyle a_{1:t}\sim P(a_{1:t}|g,s_{0})}
8:
179:A causal Diagram of agent's goal and actions
814:"Action understanding as inverse planning"
1147:
1115:
1072:
988:
902:
749:
734:
722:
700:
681:
672:
661:
628:
622:
599:
579:
559:
529:
517:
481:
468:
448:
438:
430:
425:
407:
394:
374:
362:
350:
335:
329:
317:
285:
270:
258:
233:
227:
198:
192:
129:Learn how and when to remove this message
891:Proceedings of the AAAI Symposium Series
614:is the Boltzmann temperature parameter.
554:is the cost of the optimal plan to goal
801:
159:Inverse planning is closely related to
308:Boltzmann rational action distribution
7:
864:"Goal Inference as Inverse Planning"
857:
855:
807:
805:
617:Then giving action observations of
25:
109:. Please discuss further on the
88:
31:
1083:10.1109/ICRA48891.2023.10161352
830:10.1016/j.cognition.2009.07.005
146:computational cognitive science
767:
761:
755:
735:
715:
706:
673:
666:
541:
522:
493:
490:
487:
461:
445:
416:
413:
387:
371:
356:
336:
322:
291:
271:
251:
185:sequential Monte Carlo methods
161:Inverse Reinforcement Learning
81:Inferring motives from actions
1:
1067:. IEEE. pp. 7628–7634.
999:10.1609/aaai.v33i01.33016163
1136:Topics in Cognitive Science
650:, Inverse Planning applies
574:by first performing action
1215:
547:{\displaystyle Q(s_{0},a)}
913:10.1609/aaaiss.v2i1.27645
171:Bayesian inverse planning
1038:10.1038/s41562-017-0064
643:{\displaystyle a_{1:t}}
213:{\displaystyle a_{1:t}}
150:artificial intelligence
46:, as no other articles
1026:Nature Human Behaviour
774:
644:
608:
607:{\displaystyle \beta }
588:
568:
548:
504:
298:
214:
180:
775:
645:
609:
589:
569:
549:
505:
299:
215:
178:
152:for modeling agents'
107:neutral point of view
660:
621:
598:
578:
558:
516:
316:
226:
191:
1158:10.1111/tops.12525
770:
640:
604:
584:
564:
544:
500:
437:
294:
210:
181:
65:for suggestions.
55:to this page from
1199:Cognitive science
1092:979-8-3503-2365-8
949:978-1-7138-2954-6
587:{\displaystyle a}
567:{\displaystyle g}
498:
456:
421:
382:
139:
138:
131:
102:with its subject.
79:
78:
16:(Redirected from
1206:
1178:
1177:
1151:
1127:
1121:
1120:
1119:
1103:
1097:
1096:
1076:
1056:
1050:
1049:
1017:
1011:
1010:
992:
983:(1): 6163–6170.
968:
962:
961:
931:
925:
924:
906:
882:
876:
875:
859:
850:
849:
809:
779:
777:
776:
771:
754:
753:
738:
733:
732:
705:
704:
692:
691:
676:
649:
647:
646:
641:
639:
638:
613:
611:
610:
605:
593:
591:
590:
585:
573:
571:
570:
565:
553:
551:
550:
545:
534:
533:
509:
507:
506:
501:
499:
497:
496:
486:
485:
473:
472:
457:
449:
436:
435:
434:
419:
412:
411:
399:
398:
383:
375:
363:
355:
354:
339:
334:
333:
303:
301:
300:
295:
290:
289:
274:
269:
268:
244:
243:
219:
217:
216:
211:
209:
208:
165:plan recognition
142:Inverse Planning
134:
127:
123:
120:
114:
100:close connection
92:
91:
84:
74:
71:
60:
58:related articles
35:
27:
21:
18:Inverse Planning
1214:
1213:
1209:
1208:
1207:
1205:
1204:
1203:
1184:
1183:
1182:
1181:
1129:
1128:
1124:
1105:
1104:
1100:
1093:
1058:
1057:
1053:
1019:
1018:
1014:
970:
969:
965:
950:
933:
932:
928:
884:
883:
879:
861:
860:
853:
811:
810:
803:
798:
789:
745:
718:
696:
677:
658:
657:
624:
619:
618:
596:
595:
576:
575:
556:
555:
525:
514:
513:
477:
464:
426:
420:
403:
390:
364:
346:
325:
314:
313:
281:
254:
229:
224:
223:
194:
189:
188:
173:
135:
124:
118:
115:
104:
93:
89:
82:
75:
69:
66:
56:
53:introduce links
36:
23:
22:
15:
12:
11:
5:
1212:
1210:
1202:
1201:
1196:
1194:Theory of mind
1186:
1185:
1180:
1179:
1142:(2): 414–432.
1122:
1098:
1091:
1051:
1012:
963:
948:
926:
877:
851:
824:(3): 329–349.
800:
799:
797:
794:
788:
785:
769:
766:
763:
760:
757:
752:
748:
744:
741:
737:
731:
728:
725:
721:
717:
714:
711:
708:
703:
699:
695:
690:
687:
684:
680:
675:
671:
668:
665:
637:
634:
631:
627:
603:
583:
563:
543:
540:
537:
532:
528:
524:
521:
495:
492:
489:
484:
480:
476:
471:
467:
463:
460:
455:
452:
447:
444:
441:
433:
429:
424:
418:
415:
410:
406:
402:
397:
393:
389:
386:
381:
378:
373:
370:
367:
361:
358:
353:
349:
345:
342:
338:
332:
328:
324:
321:
293:
288:
284:
280:
277:
273:
267:
264:
261:
257:
253:
250:
247:
242:
239:
236:
232:
207:
204:
201:
197:
172:
169:
154:Theory of mind
137:
136:
96:
94:
87:
80:
77:
76:
63:Find link tool
39:
37:
30:
24:
14:
13:
10:
9:
6:
4:
3:
2:
1211:
1200:
1197:
1195:
1192:
1191:
1189:
1175:
1171:
1167:
1163:
1159:
1155:
1150:
1145:
1141:
1137:
1133:
1126:
1123:
1118:
1113:
1109:
1102:
1099:
1094:
1088:
1084:
1080:
1075:
1070:
1066:
1062:
1055:
1052:
1047:
1043:
1039:
1035:
1031:
1027:
1023:
1016:
1013:
1008:
1004:
1000:
996:
991:
986:
982:
978:
974:
967:
964:
959:
955:
951:
945:
941:
937:
930:
927:
922:
918:
914:
910:
905:
900:
896:
892:
888:
881:
878:
873:
869:
865:
858:
856:
852:
847:
843:
839:
835:
831:
827:
823:
819:
815:
808:
806:
802:
795:
793:
786:
784:
780:
764:
758:
750:
746:
742:
739:
729:
726:
723:
719:
712:
709:
701:
697:
693:
688:
685:
682:
678:
669:
663:
655:
653:
635:
632:
629:
625:
615:
601:
581:
561:
538:
535:
530:
526:
519:
510:
482:
478:
474:
469:
465:
458:
453:
450:
442:
439:
431:
427:
422:
408:
404:
400:
395:
391:
384:
379:
376:
368:
365:
359:
351:
347:
343:
340:
330:
326:
319:
311:
309:
304:
286:
282:
278:
275:
265:
262:
259:
255:
248:
245:
240:
237:
234:
230:
221:
205:
202:
199:
195:
186:
177:
170:
168:
166:
162:
157:
155:
151:
147:
143:
133:
130:
122:
112:
108:
103:
101:
95:
86:
85:
73:
64:
59:
54:
50:
49:
45:
40:This article
38:
34:
29:
28:
19:
1139:
1135:
1125:
1107:
1101:
1064:
1054:
1029:
1025:
1015:
980:
976:
966:
939:
929:
897:(1): 26–33.
894:
890:
880:
871:
867:
821:
817:
790:
781:
656:
616:
511:
312:
305:
222:
182:
158:
141:
140:
125:
116:
97:
67:
41:
1032:(4): 1–10.
787:Application
70:August 2024
1188:Categories
1149:2003.11778
1117:2402.17930
1074:2301.05223
990:1901.06085
904:2306.16207
796:References
652:Bayes rule
119:March 2024
61:; try the
48:link to it
1166:1756-8757
1046:2397-3374
1007:2374-3468
958:219687443
921:2994-4317
838:0010-0277
818:Cognition
710:∝
602:β
454:β
443:
423:∑
380:β
369:
246:∼
111:talk page
51:. Please
1174:33829670
846:19729154
220:, where
1172:
1164:
1089:
1044:
1005:
956:
946:
919:
844:
836:
594:, and
512:where
44:orphan
42:is an
1144:arXiv
1112:arXiv
1069:arXiv
985:arXiv
954:S2CID
899:arXiv
874:(29).
1170:PMID
1162:ISSN
1087:ISBN
1042:ISSN
1003:ISSN
944:ISBN
917:ISSN
842:PMID
834:ISSN
148:and
1154:doi
1079:doi
1034:doi
995:doi
909:doi
826:doi
822:113
440:exp
366:exp
1190::
1168:.
1160:.
1152:.
1140:13
1138:.
1134:.
1110:,
1085:.
1077:.
1063:.
1040:.
1028:.
1024:.
1001:.
993:.
981:33
979:.
975:.
952:.
938:.
915:.
907:.
893:.
889:.
872:29
870:.
866:.
854:^
840:.
832:.
820:.
816:.
804:^
310:,
156:.
1176:.
1156::
1146::
1114::
1095:.
1081::
1071::
1048:.
1036::
1030:1
1009:.
997::
987::
960:.
923:.
911::
901::
895:2
848:.
828::
768:)
765:g
762:(
759:P
756:)
751:0
747:s
743:,
740:g
736:|
730:t
727::
724:1
720:a
716:(
713:P
707:)
702:0
698:s
694:,
689:t
686::
683:1
679:a
674:|
670:g
667:(
664:P
636:t
633::
630:1
626:a
582:a
562:g
542:)
539:a
536:,
531:0
527:s
523:(
520:Q
494:)
491:)
488:)
483:j
479:a
475:,
470:0
466:s
462:(
459:Q
451:1
446:(
432:j
428:a
417:)
414:)
409:i
405:a
401:,
396:0
392:s
388:(
385:Q
377:1
372:(
360:=
357:)
352:0
348:s
344:,
341:g
337:|
331:i
327:a
323:(
320:P
292:)
287:0
283:s
279:,
276:g
272:|
266:t
263::
260:1
256:a
252:(
249:P
241:t
238::
235:1
231:a
206:t
203::
200:1
196:a
132:)
126:(
121:)
117:(
113:.
72:)
68:(
20:)
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.