3056:
48:
2206:
2038:
2286:, the machine will move backwards, with the load force doing work on the input force. So these machines can be used in either direction, with the driving force applied to either input point. For example, if the load force on a lever is high enough, the lever will move backwards, moving the input arm backwards against the input force. These are called
1898:
330:
If a simple machine does not dissipate energy through friction, wear or deformation, then energy is conserved and it is called an ideal simple machine. In this case, the power into the machine equals the power out, and the mechanical advantage can be calculated from its geometric dimensions.
3098:
The identification of simple machines arises from a desire for a systematic method to invent new machines. Therefore, an important concern is how simple machines are combined to make more complex machines. One approach is to attach simple machines in series to obtain compound machines.
2340:
On an inclined plane, a load can be pulled up the plane by a sideways input force, but if the plane is not too steep and there is enough friction between load and plane, when the input force is removed the load will remain motionless and will not slide down the plane, regardless of its
2882:
1497:
118:
losses, the work done on the load is equal to the work done by the applied force. The machine can increase the amount of the output force, at the cost of a proportional decrease in the distance moved by the load. The ratio of the output to the applied force is called the
1891:
1095:
923:
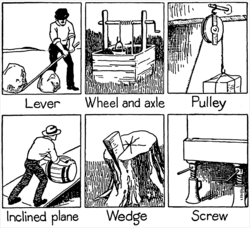
3106:, who collected and studied over 800 elementary machines. He realized that a lever, pulley, and wheel and axle are in essence the same device: a body rotating about a hinge. Similarly, an inclined plane, wedge, and screw are a block sliding on a flat surface.
1651:
2125:
2459:
2336:
The most common example is a screw. In most screws, one can move the screw forward or backward by turning it, and one can move the nut along the shaft by turning it, but no amount of pushing the screw or the nut will cause either of them to
277:, as the simple machines were called, began to be studied from the standpoint of how far they could lift a load, in addition to the force they could apply, leading eventually to the new concept of mechanical work. In 1586 Flemish engineer
999:
1775:
2788:
1409:
215:) expresses his realization that there was no limit to the amount of force amplification that could be achieved by using mechanical advantage. Later Greek philosophers defined the classic five simple machines (excluding the
3078:
called a hinged joint. Similarly, the flat surface of an inclined plane and wedge are examples of the kinematic pair called a sliding joint. The screw is usually identified as its own kinematic pair called a helical joint.
2196:
1564:
795:
2033:{\displaystyle \mathrm {MA} _{\text{compound}}={F_{\text{out1}} \over F_{\text{in1}}}{F_{\text{out2}} \over F_{\text{in2}}}{F_{\text{out3}} \over F_{\text{in3}}}\ldots {F_{{\text{out}}N} \over F_{{\text{in}}N}}\,}
3027:
447:
841:
2966:
2657:
653:
1342:
2729:
732:
1782:
2776:
2793:
1414:
139:
Although they continue to be of great importance in mechanics and applied science, modern mechanics has moved beyond the view of the simple machines as the ultimate building blocks of which all
2511:
2317:
machine. These machines can only be set in motion by a force at the input, and when the input force is removed will remain motionless, "locked" by friction at whatever position they were left.
2047:
281:
derived the mechanical advantage of the inclined plane, and it was included with the other simple machines. The complete dynamic theory of simple machines was worked out by
Italian scientist
3281:
1013:
2377:
830:
572:
1711:
The mechanical advantage of a compound machine is the ratio of the output force exerted by the last machine in the series divided by the input force applied to the first machine, that is
1235:
1145:
1574:
392:
at another point. Although some machines only change the direction of the force, such as a stationary pulley, most machines multiply the magnitude of the force by a factor, the
2255:
1402:
1287:
2284:
936:
602:
2911:
2600:
2573:
1716:
1200:
681:
3074:
ranging from the steam engine to robot manipulators. The bearings that form the fulcrum of a lever and that allow the wheel and axle and pulleys to rotate are examples of a
2546:
1172:
503:
390:
3109:
This realization shows that it is the joints, or the connections that provide movement, that are the primary elements of a machine. Starting with four types of joints, the
3047:
that transmit forces and movement, monitored by sensors and controllers. The components of actuators and mechanisms consist of links and joints that form kinematic chains.
530:
359:
3431:
155:, is inadequately described by these six simple categories. Various post-Renaissance authors have compiled expanded lists of "simple machines", often using terms like
2305:
However, in some machines, if the frictional forces are high enough, no amount of load force can move it backwards, even if the input force is zero. This is called a
2370:
1674:
1367:
3031:
Thus the machine self-locks, because the work dissipated in friction is greater than the work done by the load force moving it backwards even with no input force.
2521:
When a machine moves in the forward direction from point 1 to point 2, with the input force doing work on a load force, from conservation of energy the input work
2134:
1506:
295:), in which he showed the underlying mathematical similarity of the machines as force amplifiers. He was the first to explain that simple machines do not create
739:
2042:
Thus, the mechanical advantage of the compound machine is equal to the product of the mechanical advantages of the series of simple machines that form it
2973:
2344:
A wedge can be driven into a block of wood by force on the end, such as from hitting it with a sledge hammer, forcing the sides apart, but no amount of
400:
3897:
3924:
3870:
3125:, and related connections such as cables and belts, it is possible to understand a machine as an assembly of solid parts that connect these joints.
2918:
310:(1452–1519), but were unpublished and merely documented in his notebooks, and were based on pre-Newtonian science such as believing friction was an
3762:
1294:
136:. The mechanical advantage of a compound machine is just the product of the mechanical advantages of the simple machines of which it is composed.
3686:
2877:{\displaystyle {\begin{aligned}2W_{\text{load}}&<W_{\text{load}}+W_{\text{fric}}\\W_{\text{load}}&<W_{\text{fric}}\end{aligned}}}
4020:
3993:
3966:
3934:
3907:
3880:
3853:
3829:
3799:
3772:
3745:
3696:
3669:
3635:
3545:
3519:
3375:
3240:
3208:
1692:
formed from a set of simple machines connected in series with the output force of one providing the input force to the next. For example, a
1676:. So a machine that includes friction will not be able to move as large a load as a corresponding ideal machine using the same input force.
1492:{\displaystyle {\begin{aligned}\eta &\equiv {P_{\text{out}} \over P_{\text{in}}}\\P_{\text{out}}&=\eta P_{\text{in}}\end{aligned}}}
3509:
2737:
4071:
3956:
3789:
3404:
3318:
2129:
Similarly, the efficiency of a compound machine is also the product of the efficiencies of the series of simple machines that form it
3625:
2886:
When the machine moves backward from point 2 to point 1 with the load force doing work on the input force, the work lost to friction
3598:
2609:
1237:, the output force is less than the input, but the distance moved by the load is greater than the distance moved by the input force.
536:
607:
2680:
132:(sometimes called "compound machines") are composed. For example, wheels, levers, and pulleys are all used in the mechanism of a
3659:
686:
334:
Although each machine works differently mechanically, the way they function is similar mathematically. In each machine, a force
4515:
1886:{\displaystyle F_{\text{out1}}=F_{\text{in2}},\;F_{\text{out2}}=F_{\text{in3}},\,\ldots \;F_{{\text{out}}K}=F_{{\text{in}}K+1}}
4280:
3086:
by attaching a link that connects the output of one crank to the input of another. Additional links can be attached to form a
4453:
1656:
So in non-ideal machines, the mechanical advantage is always less than the velocity ratio by the product with the efficiency
207:
in the lever. Archimedes' famous remark with regard to the lever: "Give me a place to stand on, and I will move the Earth," (
3983:
3735:
71:(also called leverage) to multiply force. Usually the term refers to the six classical simple machines that were defined by
3308:
3230:
1100:
This can be calculated from the geometry of the machine. For example, the mechanical advantage and distance ratio of the
3586:
2470:
1147:, the output force is greater than the input, the machine acts as a force amplifier, but the distance moved by the load
1090:{\displaystyle \mathrm {MA} _{\text{ideal}}={F_{\text{out}} \over F_{\text{in}}}={d_{\text{in}} \over d_{\text{out}}}\,}
918:{\displaystyle \mathrm {MA} _{\text{ideal}}={F_{\text{out}} \over F_{\text{in}}}={v_{\text{in}} \over v_{\text{out}}}\,}
2513:(ideal mechanical advantage). If both the friction and ideal mechanical advantage are high enough, it will self-lock.
319:
3392:
3365:
802:
4234:
4211:
311:
4116:
2329:
247:
99:
3451:
4520:
3060:
3397:
Proceedings of the 9th Annual
Workshop on the Design, Specification, and Verification of Interactive Systems
3337:
3173:
3044:
2464:
1646:{\displaystyle \mathrm {MA} ={F_{\text{out}} \over F_{\text{in}}}=\eta {v_{\text{in}} \over v_{\text{out}}}}
39:
2320:
Self-locking occurs mainly in those machines with large areas of sliding contact between moving parts: the
4111:
4064:
2321:
2210:
2120:{\displaystyle \mathrm {MA} _{\text{compound}}=\mathrm {MA} _{1}\mathrm {MA} _{2}\ldots \mathrm {MA} _{N}}
1242:
1208:
1118:
475:
200:
104:
1404:) is defined as the ratio of power out to the power in, and is a measure of the frictional energy losses
4458:
3439:, U.S. Navy Naval Education and Training Professional Development and Technology Center, NAVEDTRA 14037.
3055:
2345:
1347:
152:
35:
2454:{\displaystyle \eta \equiv {\frac {F_{\text{out}}/F_{\text{in}}}{d_{\text{in}}/d_{\text{out}}}}<0.5}
2231:
1372:
1264:
2260:
579:
4366:
4267:
4257:
4247:
4176:
3568:
3158:
3138:
2889:
2578:
2551:
1689:
1177:
658:
467:
393:
259:
204:
196:
140:
121:
68:
2524:
1150:
481:
368:
3134:
1261:
All real machines have friction, which causes some of the input power to be dissipated as heat. If
508:
337:
220:
128:
Simple machines can be regarded as the elementary "building blocks" of which all more complicated
4144:
4040:
3485:
3071:
315:
254:, and describes their fabrication and uses. However the Greeks' understanding was limited to the
655:. Similarly the power input from the applied force is equal to the velocity of the input point
151:
texts. The great variety and sophistication of modern machine linkages, which arose during the
4478:
4057:
4016:
3989:
3962:
3930:
3903:
3876:
3849:
3825:
3795:
3768:
3741:
3692:
3665:
3631:
3594:
3541:
3535:
3515:
3400:
3371:
3314:
3236:
3204:
2214:
307:
4010:
3257:
3083:
1250:
2355:
1659:
1352:
4494:
4463:
4361:
4224:
3587:"Evolution of design, use, and strength calculations of screw threads and threaded joints"
3163:
3142:
3118:
3114:
3087:
3067:
2218:
459:
362:
282:
176:
111:
31:
3133:
The design of mechanisms to perform required movement and force transmission is known as
994:{\displaystyle {v_{\text{out}} \over v_{\text{in}}}={d_{\text{out}} \over d_{\text{in}}}}
17:
1770:{\displaystyle \mathrm {MA} _{\text{compound}}={F_{{\text{out}}N} \over F_{\text{in1}}}}
4323:
4164:
4149:
4121:
4096:
3110:
3103:
3075:
2325:
1705:
263:
216:
208:
180:
168:
148:
94:
84:
3489:
47:
4509:
4473:
4318:
4313:
4252:
4186:
144:
4308:
4219:
4154:
4139:
478:, in an ideal simple machine, the power output (rate of energy output) at any time
278:
2205:
4036:
167:
to distinguish them from the classical simple machines above. By the late 1800s,
4468:
4384:
4376:
4298:
4242:
4201:
931:
is also equal to the ratio of the distances covered in any given period of time
270:
72:
30:
This article is about the concept in physics. For independent record label, see
4427:
4389:
4303:
4275:
3168:
3146:
3122:
2222:
1697:
219:) and were able to calculate their (ideal) mechanical advantage. For example,
192:
2191:{\displaystyle \eta _{\text{compound}}=\eta _{1}\eta _{2}\ldots \;\eta _{N}.}
1696:
consists of a lever (the vise's handle) in series with a screw, and a simple
1003:
Therefore, the mechanical advantage of an ideal machine is also equal to the
4404:
3137:. This is a collection of geometric techniques for the mechanical design of
1559:{\displaystyle F_{\text{out}}v_{\text{out}}=\eta F_{\text{in}}v_{\text{in}}}
1105:
3627:
Groundbreaking
Experiments, Inventions, and Discoveries of the Middle Ages
3393:"Foundations of cognitive support: Toward abstract patterns of usefulness"
1245:, which uses rotational motion, the input force should be replaced by the
4409:
4399:
4328:
4181:
3178:
3040:
790:{\displaystyle F_{\text{out}}v_{\text{out}}=F_{\text{in}}v_{\text{in}}\,}
463:
303:
239:
115:
3711:
This fundamental insight was the subject of
Galileo Galilei's 1600 work
3472:
The kinematics of machinery (translated and annotated by A.B.W. Kennedy)
4419:
4338:
4290:
4080:
2463:
Whether a machine is self-locking depends on both the friction forces (
255:
133:
129:
60:
1501:
As above, the power is equal to the product of force and velocity, so
67:. In general, they can be defined as the simplest mechanisms that use
4356:
4196:
4106:
3591:
HMM2004 International
Symposium on History of Machines and Mechanisms
2348:
force from the wood walls will cause it to pop back out of the block.
1246:
455:
296:
243:
89:
3820:
Uicker, John J. Jr.; Pennock, Gordon R.; Shigley, Joseph E. (2003),
3491:
Reuleaux
Collection of Mechanisms and Machines at Cornell University
3201:
Mechanical sciences: engineering mechanics and strength of materials
27:
Mechanical device that changes the direction or magnitude of a force
3022:{\displaystyle W_{\text{2,1}}=W_{\text{load}}-W_{\text{fric}}<0}
1779:
Because the output force of each machine is the input of the next,
191:
The idea of a simple machine originated with the Greek philosopher
4448:
4443:
4394:
4131:
4101:
3332:
3330:
3054:
2204:
1101:
442:{\displaystyle \mathrm {MA} ={F_{\text{out}} \over F_{\text{in}}}}
251:
235:
79:
64:
462:
than they receive from the input force. A simple machine with no
451:
that can be calculated from the machine's geometry and friction.
4351:
4346:
4191:
4168:
1701:
1693:
258:
of simple machines (the balance of forces), and did not include
4053:
2961:{\displaystyle W_{\text{load}}=W_{\text{2,1}}+W_{\text{fric}}}
2652:{\displaystyle W_{\text{1,2}}=W_{\text{load}}+W_{\text{fric}}}
2352:
A machine will be self-locking if and only if its efficiency
2257:
on the machine is high enough in relation to the input force
1007:, the ratio of input distance moved to output distance moved
648:{\displaystyle P_{\text{out}}=F_{\text{out}}v_{\text{out}}\,}
262:, the tradeoff between force and distance, or the concept of
3181:, the only elementary machine discovered in the 20th century
1337:{\displaystyle P_{\text{in}}=P_{\text{out}}+P_{\text{fric}}}
4049:
2724:{\displaystyle \eta =W_{\text{load}}/W_{\text{1,2}}<0.5}
2213:'s self-locking property is the reason for its wide use in
1289:
is the power lost to friction, from conservation of energy
1111:
The mechanical advantage can be greater or less than one:
727:{\displaystyle P_{\text{in}}=F_{\text{in}}v_{\text{in}}\!}
171:
had identified hundreds of machine elements, calling them
3039:
Machines are studied as mechanical systems consisting of
3199:
Paul, Akshoy; Roy, Pijush; Mukherjee, Sanchayan (2005),
2548:
is equal to the sum of the work done on the load force
234:
lists five mechanisms that can "set a load in motion":
3102:
However, a more successful strategy was identified by
3824:(third ed.), New York: Oxford University Press,
2976:
2921:
2892:
2791:
2740:
2683:
2612:
2581:
2554:
2527:
2473:
2380:
2358:
2263:
2234:
2137:
2050:
1901:
1785:
1719:
1662:
1577:
1509:
1412:
1375:
1355:
1297:
1267:
1211:
1180:
1153:
1121:
1016:
939:
844:
805:
742:
689:
661:
610:
582:
539:
511:
484:
403:
371:
340:
4015:. New Delhi: PHI Learning Private Ltd. p. 202.
3661:
Wheels, clocks, and rockets: a history of technology
3585:
Strizhak, Viktor; Igor Penkov; Toivo Pappel (2004).
3511:
An introduction to the
History of Project Management
2771:{\displaystyle 2W_{\text{load}}<W_{\text{1,2}}\,}
4487:
4436:
4418:
4375:
4337:
4289:
4266:
4233:
4210:
4163:
4130:
4087:
3310:
Academic Press
Dictionary of Science and Technology
1174:is less than the distance moved by the input force
361:is applied to the device at one point, and it does
110:A simple machine uses a single applied force to do
3664:. US: W. W. Norton & Company. pp. 85–87.
3259:Physics for Technical Students: Mechanics and Heat
3082:Two levers, or cranks, are combined into a planar
3021:
2960:
2905:
2876:
2770:
2723:
2651:
2594:
2567:
2540:
2506:{\displaystyle d_{\textrm {in}}/d_{\textrm {out}}}
2505:
2453:
2364:
2278:
2249:
2190:
2119:
2032:
1885:
1769:
1668:
1645:
1558:
1491:
1396:
1361:
1336:
1281:
1229:
1194:
1166:
1139:
1089:
993:
917:
824:
789:
726:
675:
647:
596:
566:
524:
497:
441:
384:
353:
143:are composed, which arose in the Renaissance as a
3514:, Delft: Eburon Academic Publishers, p. 42,
836:, the ratio of input velocity to output velocity
723:
576:The power output equals the velocity of the load
563:
799:So the mechanical advantage of an ideal machine
3288:. Vol. 3. John Donaldson. 1773. p. 44
3370:. US: Courier Dover Publications. p. 98.
3313:. Gulf Professional Publishing. p. 1993.
825:{\displaystyle \mathrm {MA} _{\text{ideal}}\,}
567:{\displaystyle P_{\text{out}}=P_{\text{in}}\!}
4065:
3815:
3813:
3811:
3712:
1893:, this mechanical advantage is also given by
286:
175:. Modern machine theory analyzes machines as
63:that changes the direction or magnitude of a
8:
3729:
3727:
3450:U.S. Navy Bureau of Naval Personnel (1971),
3425:
3423:
3235:, New York: Barnes & Noble, p. 88,
3224:
3222:
3220:
2467:) between its parts, and the distance ratio
2298:machines, and the backward motion is called
3846:Kinematics and Dynamics of Planar Machinery
3342:, University of Virginia Physics Department
3066:Simple machines are elementary examples of
2228:In many simple machines, if the load force
454:Simple machines do not contain a source of
195:around the 3rd century BC, who studied the
4072:
4058:
4050:
4039:, New York: McGraw-Hill, online link from
3950:
3948:
3946:
3896:Goyal, M. C.; Raghuvanshee, G. S. (2011).
2174:
1843:
1812:
38:. For broader coverage of this topic, see
4035:Hartenberg, R.S. & J. Denavit (1964)
4009:Goyal, M. C.; Raghuvanshi, G. S. (2009).
3658:Stephen, Donald; Lowell Cardwell (2001).
3007:
2994:
2981:
2975:
2952:
2939:
2926:
2920:
2897:
2891:
2864:
2847:
2833:
2820:
2803:
2792:
2790:
2767:
2761:
2748:
2739:
2709:
2700:
2694:
2682:
2643:
2630:
2617:
2611:
2586:
2580:
2559:
2553:
2532:
2526:
2496:
2495:
2486:
2479:
2478:
2472:
2436:
2427:
2421:
2409:
2400:
2394:
2387:
2379:
2357:
2269:
2268:
2262:
2240:
2239:
2233:
2179:
2165:
2155:
2142:
2136:
2111:
2103:
2093:
2085:
2078:
2070:
2060:
2052:
2049:
2029:
2017:
2016:
2002:
2001:
1995:
1984:
1974:
1968:
1960:
1950:
1944:
1936:
1926:
1920:
1911:
1903:
1900:
1867:
1866:
1849:
1848:
1839:
1830:
1817:
1803:
1790:
1784:
1759:
1745:
1744:
1738:
1729:
1721:
1718:
1661:
1635:
1625:
1619:
1605:
1595:
1589:
1578:
1576:
1550:
1540:
1524:
1514:
1508:
1479:
1459:
1443:
1433:
1427:
1413:
1411:
1374:
1354:
1328:
1315:
1302:
1296:
1278:
1272:
1266:
1226:
1212:
1210:
1191:
1185:
1179:
1158:
1152:
1136:
1122:
1120:
1086:
1078:
1068:
1062:
1051:
1041:
1035:
1026:
1018:
1015:
983:
973:
967:
956:
946:
940:
938:
914:
906:
896:
890:
879:
869:
863:
854:
846:
843:
821:
815:
807:
804:
786:
780:
770:
757:
747:
741:
717:
707:
694:
688:
672:
666:
660:
644:
638:
628:
615:
609:
593:
587:
581:
557:
544:
538:
516:
510:
489:
483:
431:
421:
415:
404:
402:
376:
370:
345:
339:
3737:A Complete Course in Certificate Physics
3619:
3617:
3059:Illustration of a four-bar linkage from
46:
3503:
3501:
3359:
3357:
3203:, Prentice Hall of India, p. 215,
3191:
179:composed of elementary linkages called
34:. For the Internet forum software, see
114:against a single load force. Ignoring
3540:. Thompson Brooks/Cole. p. 123.
3256:Anderson, William Ballantyne (1914).
318:(1699) and were further developed by
7:
3794:. Firewall Media. pp. 378–380.
3761:Simmons, Ron; Cindy, Barden (2008).
3534:Ostdiek, Vern; Bord, Donald (2005).
3262:. New York: McGraw Hill. p. 112
2603:
1230:{\displaystyle \mathrm {MA} <1\,}
1140:{\displaystyle \mathrm {MA} >1\,}
199:simple machines: lever, pulley, and
3740:. India: Pitambar. pp. 28–30.
3988:. Universities Press. p. 82.
3875:. Universities Press. p. 80.
3685:Armstrong-Hélouvry, Brian (1991).
3367:A History of Mechanical Inventions
2107:
2104:
2089:
2086:
2074:
2071:
2056:
2053:
1907:
1904:
1725:
1722:
1582:
1579:
1216:
1213:
1126:
1123:
1022:
1019:
850:
847:
811:
808:
408:
405:
25:
3822:Theory of Machines and Mechanisms
3688:Control of machines with friction
3391:Wallenstein, Andrew (June 2002).
2250:{\displaystyle F_{\textrm {out}}}
1397:{\displaystyle 0<\eta \ <1}
1282:{\displaystyle P_{\text{fric}}\,}
314:fluid. They were rediscovered by
213:δῶς μοι πᾶ στῶ καὶ τὰν γᾶν κινάσω
203:. He discovered the principle of
51:The six classical simple machines
3593:. Kluwer Academic. p. 245.
3453:Basic machines and how they work
2279:{\displaystyle F_{\textrm {in}}}
683:multiplied by the applied force
597:{\displaystyle v_{\text{out}}\,}
4037:Kinematic synthesis of linkages
3961:. Firewall Media. p. 382.
3929:. Nelson Thornes. p. 110.
3474:, New York: reprinted by Dover.
3307:Morris, Christopher G. (1992).
2906:{\displaystyle W_{\text{fric}}}
2782:
2675:If the efficiency is below 50%
2595:{\displaystyle W_{\text{fric}}}
2568:{\displaystyle W_{\text{load}}}
1195:{\displaystyle d_{\text{in}}\,}
676:{\displaystyle v_{\text{in}}\,}
306:in machines were discovered by
3982:Rao, S.; Durgaiah, R. (2005).
3869:Rao, S.; Durgaiah, R. (2005).
3090:or in series to form a robot.
2575:and the work lost to friction
2541:{\displaystyle W_{\text{1,2}}}
2465:coefficient of static friction
1167:{\displaystyle d_{\text{out}}}
498:{\displaystyle P_{\text{out}}}
385:{\displaystyle F_{\text{out}}}
1:
3902:. PHI Learning. p. 212.
3764:Discover! Work & Machines
3364:Usher, Abbott Payson (1988).
3061:Kinematics of Machinery, 1876
1104:is equal to the ratio of its
604:multiplied by the load force
525:{\displaystyle P_{\text{in}}}
354:{\displaystyle F_{\text{in}}}
302:The classic rules of sliding
224:
3767:. US: Milliken. p. 29.
505:is equal to the power input
4235:Internal combustion engines
4212:External combustion engines
3164:Cam and follower mechanisms
3143:cam and follower mechanisms
320:Charles-Augustin de Coulomb
4537:
3630:. Greenwood. p. 163.
3430:Prater, Edward L. (1994),
3094:Classification of machines
1249:, and the velocity by the
29:
4089:Classical simple machines
3734:Bhatnagar, V. P. (1996).
3624:Krebs, Robert E. (2004).
3399:. Springer. p. 136.
458:, so they cannot do more
212:
18:Classical simple machines
3691:. Springer. p. 10.
1700:consists of a number of
4474:Check weighing machines
3286:Encyclopædia Britannica
3174:Mechanism (engineering)
3070:that are used to model
1708:) connected in series.
1257:Friction and efficiency
40:Mechanism (engineering)
4516:Mechanical engineering
3955:Gujral, I. S. (2005).
3788:Gujral, I. S. (2005).
3713:
3470:Reuleaux, F. (1963) ,
3229:Asimov, Isaac (1988),
3063:
3023:
2970:So the output work is
2962:
2907:
2878:
2772:
2725:
2653:
2596:
2569:
2542:
2507:
2455:
2366:
2280:
2251:
2225:
2192:
2121:
2034:
1887:
1771:
1670:
1647:
1560:
1493:
1398:
1363:
1338:
1283:
1231:
1196:
1168:
1141:
1091:
995:
919:
826:
791:
728:
677:
649:
598:
568:
526:
499:
476:conservation of energy
443:
386:
355:
287:
52:
4459:Seed-counting machine
4012:Engineering Mechanics
3985:Engineering Mechanics
3958:Engineering Mechanics
3923:Avison, John (2014).
3899:Engineering Mechanics
3872:Engineering Mechanics
3844:Paul, Burton (1979).
3791:Engineering Mechanics
3494:, Cornell University.
3459:, Dover Publications.
3232:Understanding Physics
3169:Gears and gear trains
3147:gears and gear trains
3058:
3035:Modern machine theory
3024:
2963:
2908:
2879:
2773:
2726:
2654:
2597:
2570:
2543:
2508:
2456:
2367:
2365:{\displaystyle \eta }
2281:
2252:
2208:
2201:Self-locking machines
2193:
2122:
2035:
1888:
1772:
1671:
1669:{\displaystyle \eta }
1648:
1561:
1494:
1399:
1364:
1362:{\displaystyle \eta }
1348:mechanical efficiency
1339:
1284:
1253:the shaft is turned.
1232:
1197:
1169:
1142:
1092:
996:
920:
827:
792:
729:
678:
650:
599:
569:
527:
500:
444:
387:
356:
299:, only transform it.
153:Industrial Revolution
50:
36:Simple Machines Forum
4258:Nutating disc engine
4248:Reciprocating engine
3926:The World of Physics
3569:Pappus of Alexandria
3537:Inquiry into Physics
3508:Chiu, Y. C. (2010),
3159:Linkage (mechanical)
2974:
2919:
2890:
2789:
2738:
2681:
2610:
2579:
2552:
2525:
2471:
2378:
2356:
2261:
2232:
2135:
2048:
1899:
1783:
1717:
1660:
1575:
1507:
1410:
1373:
1369:of a machine (where
1353:
1295:
1265:
1209:
1178:
1151:
1119:
1014:
937:
842:
803:
740:
687:
659:
608:
580:
537:
509:
482:
401:
394:mechanical advantage
369:
338:
326:Ideal simple machine
273:the dynamics of the
230:–75 AD) in his work
205:mechanical advantage
122:mechanical advantage
69:mechanical advantage
3135:kinematic synthesis
3129:Kinematic synthesis
221:Heron of Alexandria
4281:Peaucellier-Lipkin
4041:Cornell University
3486:Cornell University
3072:mechanical systems
3064:
3019:
2958:
2903:
2874:
2872:
2768:
2721:
2649:
2592:
2565:
2538:
2503:
2451:
2362:
2276:
2247:
2226:
2215:threaded fasteners
2188:
2117:
2030:
1883:
1767:
1666:
1643:
1556:
1489:
1487:
1394:
1359:
1334:
1279:
1227:
1192:
1164:
1137:
1087:
991:
915:
822:
787:
724:
673:
645:
594:
564:
522:
495:
439:
382:
351:
316:Guillaume Amontons
53:
4503:
4502:
4479:Riveting machines
4177:Archimedes' screw
4022:978-81-203-3789-3
3995:978-81-7371-543-3
3968:978-81-7008-636-9
3936:978-0-17-438733-6
3909:978-81-203-4327-6
3882:978-81-7371-543-3
3855:978-0-13-516062-6
3848:. Prentice Hall.
3831:978-0-19-515598-3
3801:978-81-7008-636-9
3774:978-1-4291-0947-5
3747:978-81-209-0868-0
3698:978-0-7923-9133-3
3671:978-0-393-32175-3
3637:978-0-313-32433-8
3547:978-0-534-49168-0
3521:978-90-5972-437-2
3377:978-0-486-25593-4
3339:Compound machines
3242:978-0-88029-251-1
3210:978-81-203-2611-8
3010:
2997:
2984:
2955:
2942:
2929:
2900:
2867:
2850:
2836:
2823:
2806:
2764:
2751:
2712:
2697:
2673:
2672:
2646:
2633:
2620:
2589:
2562:
2535:
2499:
2482:
2443:
2439:
2424:
2412:
2397:
2272:
2243:
2145:
2063:
2027:
2020:
2005:
1990:
1987:
1977:
1966:
1963:
1953:
1942:
1939:
1929:
1914:
1870:
1852:
1833:
1820:
1806:
1793:
1765:
1762:
1748:
1732:
1680:Compound machines
1641:
1638:
1628:
1611:
1608:
1598:
1553:
1543:
1527:
1517:
1482:
1462:
1449:
1446:
1436:
1387:
1331:
1318:
1305:
1275:
1188:
1161:
1084:
1081:
1071:
1057:
1054:
1044:
1029:
989:
986:
976:
962:
959:
949:
912:
909:
899:
885:
882:
872:
857:
818:
783:
773:
760:
750:
720:
710:
697:
669:
641:
631:
618:
590:
560:
547:
519:
492:
437:
434:
424:
379:
348:
308:Leonardo da Vinci
275:mechanical powers
161:compound machines
147:amplification of
61:mechanical device
16:(Redirected from
4528:
4182:Eductor-jet pump
4074:
4067:
4060:
4051:
4044:
4033:
4027:
4026:
4006:
4000:
3999:
3979:
3973:
3972:
3952:
3941:
3940:
3920:
3914:
3913:
3893:
3887:
3886:
3866:
3860:
3859:
3841:
3835:
3834:
3817:
3806:
3805:
3785:
3779:
3778:
3758:
3752:
3751:
3731:
3722:
3716:
3709:
3703:
3702:
3682:
3676:
3675:
3655:
3649:
3648:
3646:
3644:
3621:
3612:
3611:
3609:
3607:
3582:
3576:
3565:
3559:
3558:
3556:
3554:
3531:
3525:
3524:
3505:
3496:
3495:
3482:
3476:
3475:
3467:
3461:
3460:
3458:
3447:
3441:
3440:
3438:
3427:
3418:
3417:
3415:
3413:
3388:
3382:
3381:
3361:
3352:
3351:
3349:
3347:
3334:
3325:
3324:
3304:
3298:
3297:
3295:
3293:
3278:
3272:
3271:
3269:
3267:
3253:
3247:
3246:
3226:
3215:
3214:
3196:
3084:four-bar linkage
3068:kinematic chains
3051:Kinematic chains
3028:
3026:
3025:
3020:
3012:
3011:
3008:
2999:
2998:
2995:
2986:
2985:
2982:
2967:
2965:
2964:
2959:
2957:
2956:
2953:
2944:
2943:
2940:
2931:
2930:
2927:
2912:
2910:
2909:
2904:
2902:
2901:
2898:
2883:
2881:
2880:
2875:
2873:
2869:
2868:
2865:
2852:
2851:
2848:
2838:
2837:
2834:
2825:
2824:
2821:
2808:
2807:
2804:
2777:
2775:
2774:
2769:
2766:
2765:
2762:
2753:
2752:
2749:
2732:
2730:
2728:
2727:
2722:
2714:
2713:
2710:
2704:
2699:
2698:
2695:
2667:
2658:
2656:
2655:
2650:
2648:
2647:
2644:
2635:
2634:
2631:
2622:
2621:
2618:
2604:
2601:
2599:
2598:
2593:
2591:
2590:
2587:
2574:
2572:
2571:
2566:
2564:
2563:
2560:
2547:
2545:
2544:
2539:
2537:
2536:
2533:
2512:
2510:
2509:
2504:
2502:
2501:
2500:
2497:
2490:
2485:
2484:
2483:
2480:
2460:
2458:
2457:
2452:
2444:
2442:
2441:
2440:
2437:
2431:
2426:
2425:
2422:
2415:
2414:
2413:
2410:
2404:
2399:
2398:
2395:
2388:
2371:
2369:
2368:
2363:
2285:
2283:
2282:
2277:
2275:
2274:
2273:
2270:
2256:
2254:
2253:
2248:
2246:
2245:
2244:
2241:
2197:
2195:
2194:
2189:
2184:
2183:
2170:
2169:
2160:
2159:
2147:
2146:
2143:
2126:
2124:
2123:
2118:
2116:
2115:
2110:
2098:
2097:
2092:
2083:
2082:
2077:
2065:
2064:
2061:
2059:
2039:
2037:
2036:
2031:
2028:
2026:
2025:
2021:
2018:
2011:
2010:
2006:
2003:
1996:
1991:
1989:
1988:
1985:
1979:
1978:
1975:
1969:
1967:
1965:
1964:
1961:
1955:
1954:
1951:
1945:
1943:
1941:
1940:
1937:
1931:
1930:
1927:
1921:
1916:
1915:
1912:
1910:
1892:
1890:
1889:
1884:
1882:
1881:
1871:
1868:
1858:
1857:
1853:
1850:
1835:
1834:
1831:
1822:
1821:
1818:
1808:
1807:
1804:
1795:
1794:
1791:
1776:
1774:
1773:
1768:
1766:
1764:
1763:
1760:
1754:
1753:
1749:
1746:
1739:
1734:
1733:
1730:
1728:
1706:wheels and axles
1686:compound machine
1675:
1673:
1672:
1667:
1652:
1650:
1649:
1644:
1642:
1640:
1639:
1636:
1630:
1629:
1626:
1620:
1612:
1610:
1609:
1606:
1600:
1599:
1596:
1590:
1585:
1565:
1563:
1562:
1557:
1555:
1554:
1551:
1545:
1544:
1541:
1529:
1528:
1525:
1519:
1518:
1515:
1498:
1496:
1495:
1490:
1488:
1484:
1483:
1480:
1464:
1463:
1460:
1450:
1448:
1447:
1444:
1438:
1437:
1434:
1428:
1403:
1401:
1400:
1395:
1385:
1368:
1366:
1365:
1360:
1343:
1341:
1340:
1335:
1333:
1332:
1329:
1320:
1319:
1316:
1307:
1306:
1303:
1288:
1286:
1285:
1280:
1277:
1276:
1273:
1251:angular velocity
1236:
1234:
1233:
1228:
1219:
1201:
1199:
1198:
1193:
1190:
1189:
1186:
1173:
1171:
1170:
1165:
1163:
1162:
1159:
1146:
1144:
1143:
1138:
1129:
1096:
1094:
1093:
1088:
1085:
1083:
1082:
1079:
1073:
1072:
1069:
1063:
1058:
1056:
1055:
1052:
1046:
1045:
1042:
1036:
1031:
1030:
1027:
1025:
1000:
998:
997:
992:
990:
988:
987:
984:
978:
977:
974:
968:
963:
961:
960:
957:
951:
950:
947:
941:
924:
922:
921:
916:
913:
911:
910:
907:
901:
900:
897:
891:
886:
884:
883:
880:
874:
873:
870:
864:
859:
858:
855:
853:
832:is equal to the
831:
829:
828:
823:
820:
819:
816:
814:
796:
794:
793:
788:
785:
784:
781:
775:
774:
771:
762:
761:
758:
752:
751:
748:
733:
731:
730:
725:
722:
721:
718:
712:
711:
708:
699:
698:
695:
682:
680:
679:
674:
671:
670:
667:
654:
652:
651:
646:
643:
642:
639:
633:
632:
629:
620:
619:
616:
603:
601:
600:
595:
592:
591:
588:
573:
571:
570:
565:
562:
561:
558:
549:
548:
545:
531:
529:
528:
523:
521:
520:
517:
504:
502:
501:
496:
494:
493:
490:
448:
446:
445:
440:
438:
436:
435:
432:
426:
425:
422:
416:
411:
391:
389:
388:
383:
381:
380:
377:
360:
358:
357:
352:
350:
349:
346:
290:
229:
226:
214:
177:kinematic chains
165:machine elements
21:
4536:
4535:
4531:
4530:
4529:
4527:
4526:
4525:
4521:Simple machines
4506:
4505:
4504:
4499:
4495:Spring (device)
4483:
4464:Vending machine
4432:
4414:
4371:
4333:
4285:
4262:
4229:
4225:Stirling engine
4206:
4159:
4126:
4083:
4078:
4048:
4047:
4034:
4030:
4023:
4008:
4007:
4003:
3996:
3981:
3980:
3976:
3969:
3954:
3953:
3944:
3937:
3922:
3921:
3917:
3910:
3895:
3894:
3890:
3883:
3868:
3867:
3863:
3856:
3843:
3842:
3838:
3832:
3819:
3818:
3809:
3802:
3787:
3786:
3782:
3775:
3760:
3759:
3755:
3748:
3733:
3732:
3725:
3710:
3706:
3699:
3684:
3683:
3679:
3672:
3657:
3656:
3652:
3642:
3640:
3638:
3623:
3622:
3615:
3605:
3603:
3601:
3584:
3583:
3579:
3566:
3562:
3552:
3550:
3548:
3533:
3532:
3528:
3522:
3507:
3506:
3499:
3484:
3483:
3479:
3469:
3468:
3464:
3456:
3449:
3448:
3444:
3436:
3429:
3428:
3421:
3411:
3409:
3407:
3390:
3389:
3385:
3378:
3363:
3362:
3355:
3345:
3343:
3336:
3335:
3328:
3321:
3306:
3305:
3301:
3291:
3289:
3280:
3279:
3275:
3265:
3263:
3255:
3254:
3250:
3243:
3228:
3227:
3218:
3211:
3198:
3197:
3193:
3188:
3155:
3131:
3096:
3088:six-bar linkage
3053:
3037:
3003:
2990:
2977:
2972:
2971:
2948:
2935:
2922:
2917:
2916:
2893:
2888:
2887:
2871:
2870:
2860:
2853:
2843:
2840:
2839:
2829:
2816:
2809:
2799:
2787:
2786:
2757:
2744:
2736:
2735:
2705:
2690:
2679:
2678:
2676:
2665:
2639:
2626:
2613:
2608:
2607:
2582:
2577:
2576:
2555:
2550:
2549:
2528:
2523:
2522:
2519:
2491:
2474:
2469:
2468:
2432:
2417:
2416:
2405:
2390:
2389:
2376:
2375:
2354:
2353:
2315:non-overhauling
2264:
2259:
2258:
2235:
2230:
2229:
2203:
2175:
2161:
2151:
2138:
2133:
2132:
2102:
2084:
2069:
2051:
2046:
2045:
2012:
1997:
1980:
1970:
1956:
1946:
1932:
1922:
1902:
1897:
1896:
1862:
1844:
1826:
1813:
1799:
1786:
1781:
1780:
1755:
1740:
1720:
1715:
1714:
1682:
1658:
1657:
1654:
1631:
1621:
1601:
1591:
1573:
1572:
1546:
1536:
1520:
1510:
1505:
1504:
1486:
1485:
1475:
1465:
1455:
1452:
1451:
1439:
1429:
1420:
1408:
1407:
1371:
1370:
1351:
1350:
1324:
1311:
1298:
1293:
1292:
1268:
1263:
1262:
1259:
1207:
1206:
1181:
1176:
1175:
1154:
1149:
1148:
1117:
1116:
1098:
1074:
1064:
1047:
1037:
1017:
1012:
1011:
979:
969:
952:
942:
935:
934:
902:
892:
875:
865:
845:
840:
839:
806:
801:
800:
776:
766:
753:
743:
738:
737:
713:
703:
690:
685:
684:
662:
657:
656:
634:
624:
611:
606:
605:
583:
578:
577:
553:
540:
535:
534:
512:
507:
506:
485:
480:
479:
427:
417:
399:
398:
372:
367:
366:
341:
336:
335:
328:
283:Galileo Galilei
227:
189:
181:kinematic pairs
173:simple machines
43:
32:Simple Machines
28:
23:
22:
15:
12:
11:
5:
4534:
4532:
4524:
4523:
4518:
4508:
4507:
4501:
4500:
4498:
4497:
4491:
4489:
4485:
4484:
4482:
4481:
4476:
4471:
4466:
4461:
4456:
4451:
4446:
4440:
4438:
4434:
4433:
4431:
4430:
4424:
4422:
4416:
4415:
4413:
4412:
4407:
4402:
4397:
4392:
4387:
4381:
4379:
4373:
4372:
4370:
4369:
4364:
4359:
4354:
4349:
4343:
4341:
4335:
4334:
4332:
4331:
4326:
4324:Wind generator
4321:
4316:
4311:
4306:
4301:
4295:
4293:
4287:
4286:
4284:
4283:
4278:
4272:
4270:
4264:
4263:
4261:
4260:
4255:
4250:
4245:
4239:
4237:
4231:
4230:
4228:
4227:
4222:
4216:
4214:
4208:
4207:
4205:
4204:
4199:
4194:
4189:
4184:
4179:
4173:
4171:
4161:
4160:
4158:
4157:
4152:
4150:Pendulum clock
4147:
4142:
4136:
4134:
4128:
4127:
4125:
4124:
4122:Wheel and axle
4119:
4114:
4109:
4104:
4099:
4097:Inclined plane
4093:
4091:
4085:
4084:
4079:
4077:
4076:
4069:
4062:
4054:
4046:
4045:
4028:
4021:
4001:
3994:
3974:
3967:
3942:
3935:
3915:
3908:
3888:
3881:
3861:
3854:
3836:
3830:
3807:
3800:
3780:
3773:
3753:
3746:
3723:
3704:
3697:
3677:
3670:
3650:
3636:
3613:
3599:
3577:
3560:
3546:
3526:
3520:
3497:
3477:
3462:
3442:
3433:Basic machines
3419:
3406:978-3540002666
3405:
3383:
3376:
3353:
3326:
3320:978-0122004001
3319:
3299:
3273:
3248:
3241:
3216:
3209:
3190:
3189:
3187:
3184:
3183:
3182:
3176:
3171:
3166:
3161:
3154:
3151:
3130:
3127:
3111:revolute joint
3104:Franz Reuleaux
3095:
3092:
3076:kinematic pair
3052:
3049:
3036:
3033:
3018:
3015:
3006:
3002:
2993:
2989:
2980:
2951:
2947:
2938:
2934:
2925:
2896:
2863:
2859:
2856:
2854:
2846:
2842:
2841:
2832:
2828:
2819:
2815:
2812:
2810:
2802:
2798:
2795:
2794:
2760:
2756:
2747:
2743:
2720:
2717:
2708:
2703:
2693:
2689:
2686:
2671:
2670:
2661:
2659:
2642:
2638:
2629:
2625:
2616:
2585:
2558:
2531:
2518:
2515:
2494:
2489:
2477:
2450:
2447:
2435:
2430:
2420:
2408:
2403:
2393:
2386:
2383:
2372:is below 50%:
2361:
2350:
2349:
2342:
2338:
2326:inclined plane
2267:
2238:
2202:
2199:
2187:
2182:
2178:
2173:
2168:
2164:
2158:
2154:
2150:
2141:
2114:
2109:
2106:
2101:
2096:
2091:
2088:
2081:
2076:
2073:
2068:
2058:
2055:
2024:
2015:
2009:
2000:
1994:
1983:
1973:
1959:
1949:
1935:
1925:
1919:
1909:
1906:
1880:
1877:
1874:
1865:
1861:
1856:
1847:
1842:
1838:
1829:
1825:
1816:
1811:
1802:
1798:
1789:
1758:
1752:
1743:
1737:
1727:
1724:
1681:
1678:
1665:
1634:
1624:
1618:
1615:
1604:
1594:
1588:
1584:
1581:
1570:
1549:
1539:
1535:
1532:
1523:
1513:
1478:
1474:
1471:
1468:
1466:
1458:
1454:
1453:
1442:
1432:
1426:
1423:
1421:
1419:
1416:
1415:
1393:
1390:
1384:
1381:
1378:
1358:
1327:
1323:
1314:
1310:
1301:
1271:
1258:
1255:
1239:
1238:
1225:
1222:
1218:
1215:
1203:
1184:
1157:
1135:
1132:
1128:
1125:
1077:
1067:
1061:
1050:
1040:
1034:
1024:
1021:
1009:
1005:distance ratio
982:
972:
966:
955:
945:
929:velocity ratio
905:
895:
889:
878:
868:
862:
852:
849:
834:velocity ratio
813:
810:
779:
769:
765:
756:
746:
716:
706:
702:
693:
665:
637:
627:
623:
614:
586:
556:
552:
543:
515:
488:
430:
420:
414:
410:
407:
375:
365:moving a load
344:
327:
324:
217:inclined plane
188:
185:
169:Franz Reuleaux
157:basic machines
108:
107:
102:
97:
95:Inclined plane
92:
87:
85:Wheel and axle
82:
57:simple machine
26:
24:
14:
13:
10:
9:
6:
4:
3:
2:
4533:
4522:
4519:
4517:
4514:
4513:
4511:
4496:
4493:
4492:
4490:
4486:
4480:
4477:
4475:
4472:
4470:
4467:
4465:
4462:
4460:
4457:
4455:
4452:
4450:
4447:
4445:
4442:
4441:
4439:
4437:Miscellaneous
4435:
4429:
4426:
4425:
4423:
4421:
4417:
4411:
4408:
4406:
4403:
4401:
4398:
4396:
4393:
4391:
4388:
4386:
4383:
4382:
4380:
4378:
4374:
4368:
4365:
4363:
4360:
4358:
4355:
4353:
4350:
4348:
4345:
4344:
4342:
4340:
4336:
4330:
4327:
4325:
4322:
4320:
4319:Water turbine
4317:
4315:
4314:Steam turbine
4312:
4310:
4307:
4305:
4302:
4300:
4297:
4296:
4294:
4292:
4288:
4282:
4279:
4277:
4274:
4273:
4271:
4269:
4265:
4259:
4256:
4254:
4253:Rotary engine
4251:
4249:
4246:
4244:
4241:
4240:
4238:
4236:
4232:
4226:
4223:
4221:
4218:
4217:
4215:
4213:
4209:
4203:
4200:
4198:
4195:
4193:
4190:
4188:
4187:Hydraulic ram
4185:
4183:
4180:
4178:
4175:
4174:
4172:
4170:
4166:
4162:
4156:
4153:
4151:
4148:
4146:
4143:
4141:
4138:
4137:
4135:
4133:
4129:
4123:
4120:
4118:
4115:
4113:
4110:
4108:
4105:
4103:
4100:
4098:
4095:
4094:
4092:
4090:
4086:
4082:
4075:
4070:
4068:
4063:
4061:
4056:
4055:
4052:
4042:
4038:
4032:
4029:
4024:
4018:
4014:
4013:
4005:
4002:
3997:
3991:
3987:
3986:
3978:
3975:
3970:
3964:
3960:
3959:
3951:
3949:
3947:
3943:
3938:
3932:
3928:
3927:
3919:
3916:
3911:
3905:
3901:
3900:
3892:
3889:
3884:
3878:
3874:
3873:
3865:
3862:
3857:
3851:
3847:
3840:
3837:
3833:
3827:
3823:
3816:
3814:
3812:
3808:
3803:
3797:
3793:
3792:
3784:
3781:
3776:
3770:
3766:
3765:
3757:
3754:
3749:
3743:
3739:
3738:
3730:
3728:
3724:
3720:
3715:
3714:Le Meccaniche
3708:
3705:
3700:
3694:
3690:
3689:
3681:
3678:
3673:
3667:
3663:
3662:
3654:
3651:
3639:
3633:
3629:
3628:
3620:
3618:
3614:
3602:
3600:1-4020-2203-4
3596:
3592:
3588:
3581:
3578:
3574:
3570:
3564:
3561:
3549:
3543:
3539:
3538:
3530:
3527:
3523:
3517:
3513:
3512:
3504:
3502:
3498:
3493:
3492:
3487:
3481:
3478:
3473:
3466:
3463:
3455:
3454:
3446:
3443:
3435:
3434:
3426:
3424:
3420:
3408:
3402:
3398:
3394:
3387:
3384:
3379:
3373:
3369:
3368:
3360:
3358:
3354:
3341:
3340:
3333:
3331:
3327:
3322:
3316:
3312:
3311:
3303:
3300:
3287:
3283:
3277:
3274:
3261:
3260:
3252:
3249:
3244:
3238:
3234:
3233:
3225:
3223:
3221:
3217:
3212:
3206:
3202:
3195:
3192:
3185:
3180:
3177:
3175:
3172:
3170:
3167:
3165:
3162:
3160:
3157:
3156:
3152:
3150:
3148:
3144:
3140:
3136:
3128:
3126:
3124:
3120:
3116:
3115:sliding joint
3112:
3107:
3105:
3100:
3093:
3091:
3089:
3085:
3080:
3077:
3073:
3069:
3062:
3057:
3050:
3048:
3046:
3042:
3034:
3032:
3029:
3016:
3013:
3004:
3000:
2991:
2987:
2978:
2968:
2949:
2945:
2936:
2932:
2923:
2914:
2894:
2884:
2861:
2857:
2855:
2844:
2830:
2826:
2817:
2813:
2811:
2800:
2796:
2785:
2784:
2778:
2758:
2754:
2745:
2741:
2733:
2718:
2715:
2706:
2701:
2691:
2687:
2684:
2669:
2662:
2660:
2640:
2636:
2627:
2623:
2614:
2606:
2605:
2602:
2583:
2556:
2529:
2516:
2514:
2492:
2487:
2475:
2466:
2461:
2448:
2445:
2433:
2428:
2418:
2406:
2401:
2391:
2384:
2381:
2373:
2359:
2347:
2343:
2339:
2335:
2334:
2333:
2331:
2327:
2323:
2318:
2316:
2312:
2311:nonreversible
2308:
2303:
2301:
2297:
2293:
2289:
2265:
2236:
2224:
2220:
2216:
2212:
2207:
2200:
2198:
2185:
2180:
2176:
2171:
2166:
2162:
2156:
2152:
2148:
2139:
2130:
2127:
2112:
2099:
2094:
2079:
2066:
2043:
2040:
2022:
2013:
2007:
1998:
1992:
1981:
1971:
1957:
1947:
1933:
1923:
1917:
1894:
1878:
1875:
1872:
1863:
1859:
1854:
1845:
1840:
1836:
1827:
1823:
1814:
1809:
1800:
1796:
1787:
1777:
1756:
1750:
1741:
1735:
1712:
1709:
1707:
1703:
1699:
1695:
1691:
1687:
1679:
1677:
1663:
1653:
1632:
1622:
1616:
1613:
1602:
1592:
1586:
1569:
1566:
1547:
1537:
1533:
1530:
1521:
1511:
1502:
1499:
1476:
1472:
1469:
1467:
1456:
1440:
1430:
1424:
1422:
1417:
1405:
1391:
1388:
1382:
1379:
1376:
1356:
1349:
1344:
1325:
1321:
1312:
1308:
1299:
1290:
1269:
1256:
1254:
1252:
1248:
1244:
1223:
1220:
1204:
1182:
1155:
1133:
1130:
1114:
1113:
1112:
1109:
1107:
1103:
1097:
1075:
1065:
1059:
1048:
1038:
1032:
1008:
1006:
1001:
980:
970:
964:
953:
943:
932:
930:
925:
903:
893:
887:
876:
866:
860:
837:
835:
797:
777:
767:
763:
754:
744:
735:
734:. Therefore,
714:
704:
700:
691:
663:
635:
625:
621:
612:
584:
574:
554:
550:
541:
532:
513:
486:
477:
473:
472:ideal machine
470:is called an
469:
465:
461:
457:
452:
449:
428:
418:
412:
396:
395:
373:
364:
342:
332:
325:
323:
321:
317:
313:
309:
305:
300:
298:
294:
289:
288:Le Meccaniche
284:
280:
276:
272:
267:
265:
261:
257:
253:
249:
245:
241:
237:
233:
222:
218:
210:
206:
202:
198:
194:
186:
184:
182:
178:
174:
170:
166:
162:
158:
154:
150:
149:ancient Greek
146:
142:
137:
135:
131:
126:
124:
123:
117:
113:
106:
103:
101:
98:
96:
93:
91:
88:
86:
83:
81:
78:
77:
76:
74:
70:
66:
62:
58:
49:
45:
41:
37:
33:
19:
4454:Agricultural
4309:Quasiturbine
4220:Steam engine
4155:Quartz clock
4140:Atomic clock
4088:
4031:
4011:
4004:
3984:
3977:
3957:
3925:
3918:
3898:
3891:
3871:
3864:
3845:
3839:
3821:
3790:
3783:
3763:
3756:
3736:
3719:On Mechanics
3718:
3707:
3687:
3680:
3660:
3653:
3641:. Retrieved
3626:
3604:. Retrieved
3590:
3580:
3572:
3563:
3551:. Retrieved
3536:
3529:
3510:
3490:
3480:
3471:
3465:
3452:
3445:
3432:
3410:. Retrieved
3396:
3386:
3366:
3344:, retrieved
3338:
3309:
3302:
3290:. Retrieved
3285:
3276:
3264:. Retrieved
3258:
3251:
3231:
3200:
3194:
3132:
3108:
3101:
3097:
3081:
3065:
3038:
3030:
2969:
2915:
2913:is the same
2885:
2781:
2779:
2734:
2674:
2663:
2520:
2462:
2374:
2351:
2319:
2314:
2310:
2307:self-locking
2306:
2304:
2299:
2295:
2291:
2287:
2227:
2131:
2128:
2044:
2041:
1895:
1778:
1713:
1710:
1685:
1683:
1655:
1571:
1567:
1503:
1500:
1406:
1345:
1291:
1260:
1240:
1110:
1099:
1010:
1004:
1002:
933:
928:
926:
838:
833:
798:
736:
575:
533:
471:
453:
450:
397:
333:
329:
301:
293:On Mechanics
292:
279:Simon Stevin
274:
268:
231:
190:
172:
164:
160:
156:
145:neoclassical
138:
127:
120:
109:
75:scientists:
56:
54:
44:
4469:Wind tunnel
4385:Vacuum tube
4377:Electronics
4299:Gas turbine
4243:Gas turbine
4202:Vacuum pump
4165:Compressors
4145:Chronometer
3575:, Book VIII
3282:"Mechanics"
2346:compression
2300:overhauling
2296:overhauling
2292:non-locking
2223:wood screws
1568:Therefore,
285:in 1600 in
271:Renaissance
269:During the
197:Archimedean
73:Renaissance
4510:Categories
4428:Automobile
4390:Transistor
4304:Jet engine
4276:Pantograph
3567:Quoted by
3186:References
3123:gear joint
3045:mechanisms
2288:reversible
1698:gear train
1694:bench vise
1106:lever arms
468:elasticity
193:Archimedes
4405:Capacitor
4367:Propeller
3119:cam joint
3041:actuators
3001:−
2685:η
2385:≡
2382:η
2360:η
2177:η
2172:…
2163:η
2153:η
2140:η
2100:…
1993:…
1841:…
1664:η
1617:η
1534:η
1473:η
1425:≡
1418:η
1383:η
1357:η
474:. Due to
232:Mechanics
228: 10
4420:Vehicles
4410:Inductor
4400:Resistor
4339:Aerofoil
4329:Windmill
4268:Linkages
4081:Machines
3573:Synagoge
3346:June 11,
3292:April 5,
3179:Rolamite
3153:See also
3139:linkages
2144:compound
2062:compound
1913:compound
1731:compound
464:friction
322:(1785).
312:ethereal
304:friction
260:dynamics
240:windlass
141:machines
130:machines
116:friction
4488:Springs
4291:Turbine
3643:May 21,
3606:May 21,
3553:May 22,
3412:May 21,
3266:May 11,
2341:weight.
1690:machine
1241:In the
256:statics
187:History
134:bicycle
4357:Rudder
4197:Trompe
4132:Clocks
4107:Pulley
4019:
3992:
3965:
3933:
3906:
3879:
3852:
3828:
3798:
3771:
3744:
3695:
3668:
3634:
3597:
3544:
3518:
3403:
3374:
3317:
3239:
3207:
2328:, and
1386:
1247:torque
456:energy
297:energy
250:, and
244:pulley
90:Pulley
4449:Robot
4444:Mecha
4395:Diode
4169:pumps
4117:Wedge
4112:Screw
4102:Lever
3457:(PDF)
3437:(PDF)
2783:Eq. 1
2780:From
2666:Eq. 1
2517:Proof
2337:turn.
2330:wedge
2322:screw
2313:, or
2219:bolts
2217:like
2211:screw
1702:gears
1688:is a
1243:screw
1102:lever
1028:ideal
856:ideal
817:ideal
252:screw
248:wedge
236:lever
209:Greek
201:screw
163:, or
105:Screw
100:Wedge
80:Lever
65:force
59:is a
4362:Flap
4352:Wing
4347:Sail
4192:Pump
4167:and
4017:ISBN
3990:ISBN
3963:ISBN
3931:ISBN
3904:ISBN
3877:ISBN
3850:ISBN
3826:ISBN
3796:ISBN
3769:ISBN
3742:ISBN
3693:ISBN
3666:ISBN
3645:2008
3632:ISBN
3608:2008
3595:ISBN
3555:2008
3542:ISBN
3516:ISBN
3414:2008
3401:ISBN
3372:ISBN
3348:2010
3315:ISBN
3294:2020
3268:2008
3237:ISBN
3205:ISBN
3145:and
3121:and
3043:and
3014:<
3009:fric
2996:load
2954:fric
2928:load
2899:fric
2866:fric
2858:<
2849:load
2835:fric
2822:load
2814:<
2805:load
2755:<
2750:load
2716:<
2696:load
2645:fric
2632:load
2588:fric
2561:load
2446:<
2221:and
2209:The
1976:out3
1952:out2
1928:out1
1819:out2
1792:out1
1389:<
1380:<
1346:The
1330:fric
1274:fric
1221:<
1131:>
927:The
460:work
363:work
264:work
112:work
3571:in
2983:2,1
2941:2,1
2763:1,2
2719:0.5
2711:1,2
2619:1,2
2534:1,2
2498:out
2449:0.5
2438:out
2396:out
2294:or
2242:out
2004:out
1986:in3
1962:in2
1938:in1
1851:out
1832:in3
1805:in2
1761:in1
1747:out
1637:out
1597:out
1526:out
1516:out
1461:out
1435:out
1317:out
1205:If
1160:out
1115:If
1080:out
1043:out
975:out
948:out
908:out
871:out
759:out
749:out
640:out
630:out
617:out
589:out
546:out
491:out
466:or
423:out
378:out
4512::
3945:^
3810:^
3726:^
3721:).
3616:^
3589:.
3500:^
3488:,
3422:^
3395:.
3356:^
3329:^
3284:.
3219:^
3149:.
3141:,
3117:,
3113:,
2731:):
2481:in
2423:in
2411:in
2332::
2324:,
2309:,
2302:.
2290:,
2271:in
2019:in
1869:in
1684:A
1627:in
1607:in
1552:in
1542:in
1481:in
1445:in
1304:in
1187:in
1108:.
1070:in
1053:in
985:in
958:in
898:in
881:in
782:in
772:in
719:in
709:in
696:in
668:in
559:in
518:in
433:in
347:in
266:.
246:,
242:,
238:,
225:c.
211::
183:.
159:,
125:.
55:A
4073:e
4066:t
4059:v
4043:.
4025:.
3998:.
3971:.
3939:.
3912:.
3885:.
3858:.
3804:.
3777:.
3750:.
3717:(
3701:.
3674:.
3647:.
3610:.
3557:.
3416:.
3380:.
3350:.
3323:.
3296:.
3270:.
3245:.
3213:.
3017:0
3005:W
2992:W
2988:=
2979:W
2950:W
2946:+
2937:W
2933:=
2924:W
2895:W
2862:W
2845:W
2831:W
2827:+
2818:W
2801:W
2797:2
2759:W
2746:W
2742:2
2707:W
2702:/
2692:W
2688:=
2677:(
2668:)
2664:(
2641:W
2637:+
2628:W
2624:=
2615:W
2584:W
2557:W
2530:W
2493:d
2488:/
2476:d
2434:d
2429:/
2419:d
2407:F
2402:/
2392:F
2266:F
2237:F
2186:.
2181:N
2167:2
2157:1
2149:=
2113:N
2108:A
2105:M
2095:2
2090:A
2087:M
2080:1
2075:A
2072:M
2067:=
2057:A
2054:M
2023:N
2014:F
2008:N
1999:F
1982:F
1972:F
1958:F
1948:F
1934:F
1924:F
1918:=
1908:A
1905:M
1879:1
1876:+
1873:K
1864:F
1860:=
1855:K
1846:F
1837:,
1828:F
1824:=
1815:F
1810:,
1801:F
1797:=
1788:F
1757:F
1751:N
1742:F
1736:=
1726:A
1723:M
1704:(
1633:v
1623:v
1614:=
1603:F
1593:F
1587:=
1583:A
1580:M
1548:v
1538:F
1531:=
1522:v
1512:F
1477:P
1470:=
1457:P
1441:P
1431:P
1392:1
1377:0
1326:P
1322:+
1313:P
1309:=
1300:P
1270:P
1224:1
1217:A
1214:M
1202:.
1183:d
1156:d
1134:1
1127:A
1124:M
1076:d
1066:d
1060:=
1049:F
1039:F
1033:=
1023:A
1020:M
981:d
971:d
965:=
954:v
944:v
904:v
894:v
888:=
877:F
867:F
861:=
851:A
848:M
812:A
809:M
778:v
768:F
764:=
755:v
745:F
715:v
705:F
701:=
692:P
664:v
636:v
626:F
622:=
613:P
585:v
555:P
551:=
542:P
514:P
487:P
429:F
419:F
413:=
409:A
406:M
374:F
343:F
291:(
223:(
42:.
20:)
Text is available under the Creative Commons Attribution-ShareAlike License. Additional terms may apply.